2 ΩτΟΆΖΉΜΜΥΓ
2.1 ΞΣΞΛΞιΓΦΥΓ
Ψο»υ § ΐΡχΦΑΛρΩτΟΆΖΉΜΜΛ«≤ρΛ· ΐΥΓΛΈΟφΛ«ΛβΛΟΛ»ΛβΟ±ΫψΛ«ΛœΛΔΛκΛ§ΓΛΚ«ΛβάΚ≈ΌΛΈΑ≠ΛΛ ΐΥΓ Λ«ΛκΓΞΛηΛΟΛίΛ…ΛΈΛ≥Λ»Λ§ΧΒΛΛΗ¬ΛξΓΛΛ≥ΛΈ ΐΥΓΛ«»υ § ΐΡχΦΑΛρΖΉΜΜΛΖΛΤΛœΛ ΛιΛ ΛΛΓΞΛΩΛάΛΖΓΛ Ψο»υ § ΐΡχΦΑΛρΩτΟΆΖΉΜΜΛΙΛκΛ≥Λ»ΛΈΞΛΞαΓΦΞΗΛ§ΛΡΛΪΛΏΛδΛΙΛΛΛΈΛ«ΓΛ≥ΊΫ§ΛΙΛκ≤ΝΟΆΛœΛΔΛκΓΞΛβΛΠΑλ≈ΌΓΛΫι¥ϋΨρΖοΛρ¥όΛαΛΤΩτΟΆΖΉΜΜΛΥΛηΛξ≤ρΛ·ΛΌΛ≠ ΐΡχΦΑΛρΦ®ΛΙΓΞ
 |
Ϋι¥ϋΨρΖο | (6) |
Λ≥ΛΈ»υ § ΐΡχΦΑΛΈ≤ρΛρ

Λ»Λ ΛκΓΞΛ≥ΛΈΦΑΛΈ±Π ’¬η2ΙύΛœΓΛΦΑ(6) ΛΪΛιΖΉΜΜΛ« Λ≠ΛκΓΞΛΖΛΩΛ§ΛΟΛΤΓΛΞΤΞΛΞιΓΦ≈Η≥ΪΛœΓΛ
| (8) |
Λ»…ΫΛΙΛ≥Λ»Λ§Λ«Λ≠ΛκΓΞ
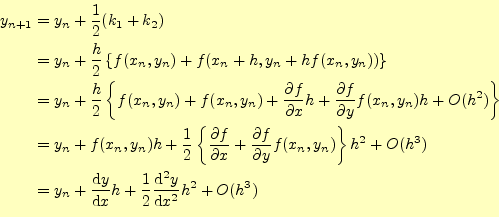
ΞΣΞΛΞιΓΦΥΓΛ«ΛΈΩτΟΆΖΉΜΜΛ«ΛœΓΛΖΉΜΜΛΈΙοΛΏ…ΐ![]() ΛœΫΫ §ΛΥΨ°ΛΒΛΛΛ»ΛΖΛΤΓΛ
ΛœΫΫ §ΛΥΨ°ΛΒΛΛΛ»ΛΖΛΤΓΛ
| (9) |
ΛρΖΉΜΜΛΙΛκΓΞΦΑ(5)Λ»Ν¥Λ·Τ±ΛΗΛ«ΛΔΛκΓΞΛ≥ΛΈΛ»Λ≠ΖΉΜΜΛΈάΚ≈ΌΛœ1ΦΓΛ» ΗάΛΠ3ΓΞ
ΞΣΞΛΞιΓΦΥΓΛρΛόΛ»ΛαΛκΛ»ΓΛΑ ≤ΦΛΥΦ®ΛΙΛηΛΠΛΥ»υ § ΐΡχΦΑΛœΚΙ § ΐΡχΦΑΛΥΕαΜςΛ«Λ≠ΛκΓΞ
 |
Λ≥ΛλΛλΛΪΛιΓΛΞΣΞΛΞιΓΦΥΓΛ«ΛΈΩτΟΆΖΉΜΜΛΈΝ≤≤ΫΦΑ
 |
Λ»Λ ΛκΓΞΫι¥ϋΟΆ
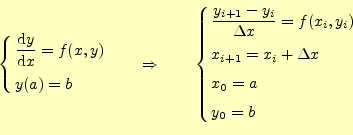
Φ¬ΚίΛΥΞΉΞμΞΑΞιΞύΛρΙ‘ΛΠΛ»Λ≠ΛœΓΛforΛδwhileΛρΆ―ΛΛΛΤΖΪΛξ ÷ΛΖΖΉΜΜΛρΙ‘ΛΠ(Αρ
Λ≈ΛκΦΑΛΈ…τ §)ΓΞΛΫΛΖΛΤΓΛΖΉΜΜΖκ≤ΧΛΈ![]() Λ»
Λ»![]() ΛœΓΛ«έΈσx[i] Λδy[i]ΛΥ≥ «Φ
ΛΙΛκΓΞ
ΛœΓΛ«έΈσx[i] Λδy[i]ΛΥ≥ «Φ
ΛΙΛκΓΞ
x[0]=a;
y[0]=b;
dx = Λ≠ΛΕΛΏ…ΐΛΈΖΉΜΜ
for(ΖΉΜΜΫΣΈΜΨρΖο){
x[i+1]=x[i]+dx;
y[i+1]=y[i]+f(x[i],y[i])*dx;
}
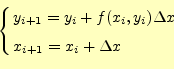
Λ≥ΛΈ ΐΥΓΛΈΖΉΜΜΛΈΞΛΞαΓΦΞΗΛœΓΛΩό4ΛΈΡΧΛξΛ«ΛΔΛκΓΞΧάΛιΛΪΛΥΓΛΫ–»· ≈άΛΈΤ≥¥ΊΩτΛΈΛΏΆχΆ―ΛΖΛΤΛΛΛκΛΩΛαΛΥάΚ≈ΌΛ§Α≠ΛΛΓΞΦΑΛβ¬–ΨΈΛ«Λ ΛΛΛΩΛαΓΛΒ’ΛΪΛιΖΉΜΜΛΙΛκΛ» ΗΒΛΥΧαΛιΛ ΛΛΓΞ
![\includegraphics[keepaspectratio, scale=1.0]{figure/Euler.eps}](img47.png)
2.2 2ΦΓΛΈΞκΞσΞ≤Ξ·ΞΟΞΩΥΓ
2ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΛ»ΗΤΛ–ΛλΛκ ΐΥΓΛœΓΛΛΛΛμΛΛΛμΛΔΛκΓΞΛ≥Λ≥Λ«ΛœΓΛ¬ε…Ϋ≈ΣΛ ΞέΞΛΞσΥΓΛ» Οφ≈άΥΓΛρΦ®ΛΙΓΞΞΣΞΛΞιΓΦΥΓΛœ1ΦΓΛΈάΚ≈ΌΛ«ΛΔΛΟΛΩΛ§ΓΛΛ≥ΛλΛιΛœ2ΦΓΛΈάΚ≈ΌΛΥΛ ΛκΓΞ2.2.1 ΞέΞΛΞσΥΓ
2.2.1.1 Ν≤≤ΫΦΑ
άηΛΥΦ®ΛΖΛΩΛηΛΠΛΥΓΛΞΣΞΛΞιΓΦΥΓΛΈάΚ≈ΌΛœ1ΦΓΛ«ΛΙΓΞΛΫΛλΛΥ¬–ΛΖΛΤΓΛ2ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΥΓ ΛΈάΚ≈ΌΛœ2ΦΓΛ»Λ ΛκΓΞΚΘΛόΛ«ΙοΛΏ…ΐΛρ2ΦΓΛΈάΚ≈ΌΛ»ΛΛΛΠΛ≥Λ»ΛœΓΛΞΤΞΛΞιΓΦ≈Η≥ΪΛηΛξ
| (12) |
Λ»Λ ΛΟΛΤΛΛΛκΛ≥Λ»ΛρΑ’ΧΘΛΙΛκΓΞ¬®ΛΝΓΛΖΉΜΜΞΔΞκΞ¥ΞξΞΚΞύΛ§ΓΛ
Λ»Λ ΛΟΛΤΛΛΛκ…§ΆΉΛ§ΛΔΛκΓΞ
ΦΑ(13)ΛΪΛι §ΛΪΛκΛηΛΠΛΥΓΛ![]() ΛΈΝΐ §
ΛΈΝΐ §![]() ΛρΖΉΜΜΛΙΛκΛΩΛαΛΥΛœΓΛ
1≥§»υ §Λ»2≥§»υ §ΛΈ2ΙύΛρΥΰΛΩΛΙΦΑΛ§…§ΆΉΛ«ΛΔΛκΓΞΛΫΛΠΛΙΛκΛ»Ψ·Λ Λ·Λ»ΛβΓΛ2≈άΛΈΟΆΛ§…§ΆΉΛ»
Λ ΛκΓΞ2≈άΛ»ΛΖΛΤΓΛΖΉΜΜΕη¥÷ΛΈΈΨΟΦΛΈΤ≥¥ΊΩτΛΈΟΆΛρΜ»ΛΠΛ≥Λ»ΛΥΛΙΛκΓΞΛ≥ΛΈΤ≥¥ΊΩτΛœΧδ¬ξΛ»ΛΖ
ΛΤΆΩΛ®ΛιΛλΛΤΛΛΛκΛΈΛ«ΓΛΖΉΜΜΛœ¥ Ο±Λ«ΛΔΛκΓΞΛΫΛΠΛΖΛΤΓΛΕη¥÷ΛΈΝΐ §Λρ
ΛρΖΉΜΜΛΙΛκΛΩΛαΛΥΛœΓΛ
1≥§»υ §Λ»2≥§»υ §ΛΈ2ΙύΛρΥΰΛΩΛΙΦΑΛ§…§ΆΉΛ«ΛΔΛκΓΞΛΫΛΠΛΙΛκΛ»Ψ·Λ Λ·Λ»ΛβΓΛ2≈άΛΈΟΆΛ§…§ΆΉΛ»
Λ ΛκΓΞ2≈άΛ»ΛΖΛΤΓΛΖΉΜΜΕη¥÷ΛΈΈΨΟΦΛΈΤ≥¥ΊΩτΛΈΟΆΛρΜ»ΛΠΛ≥Λ»ΛΥΛΙΛκΓΞΛ≥ΛΈΤ≥¥ΊΩτΛœΧδ¬ξΛ»ΛΖ
ΛΤΆΩΛ®ΛιΛλΛΤΛΛΛκΛΈΛ«ΓΛΖΉΜΜΛœ¥ Ο±Λ«ΛΔΛκΓΞΛΫΛΠΛΖΛΤΓΛΕη¥÷ΛΈΝΐ §Λρ
![]() ΛΈΞ―
ΞιΞαΓΦΞΩΓΦΛ»ΛΖΛΩœ¬Λ«…ΫΗΫΛΙΛκΓΞ¬®ΛΝΓΛ
ΛΈΞ―
ΞιΞαΓΦΞΩΓΦΛ»ΛΖΛΩœ¬Λ«…ΫΗΫΛΙΛκΓΞ¬®ΛΝΓΛ
Λ»ΛΔΛιΛοΛΙΛΈΛ«ΛΔΛκΓΞΛ≥ΛΈ
![[*]](crossref.png) )Λ»Τ±ΑλΛΥΛ«Λ≠ΛκΓΞ
)Λ»Τ±ΑλΛΥΛ«Λ≠ΛκΓΞ
Λ≥ΛΈΦΑΛρ![]() ΛΈ≤σΛξΛ«ΞΤΞΛΞιΓΦ≈Η≥ΪΛΙΛκΛ»
ΛΈ≤σΛξΛ«ΞΤΞΛΞιΓΦ≈Η≥ΪΛΙΛκΛ»
| (15) |
Λ»Λ ΛκΓΞΛ≥ΛλΛρΓΛΦΑ(13)Λ»»φΛΌΛκΛ»ΓΛ
 |
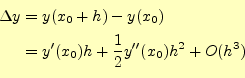
Λ§ΤάΛιΛλΛκΓΞΛ≥ΛλΛ«ΓΛ…§ΆΉΛ ΦΑΛœΒαΛόΛΟΛΩΓΞΛόΛ»ΛαΛκΛ»ΓΛΦΑ (6)ΛρΩτΟΆΖΉΜΜΛ«ΕαΜς≤ρΛρΒαΛαΛκΛΥΛœ
ΛρΜ»ΛΠΛ≥Λ»ΛΥΛ ΛκΓΞ≤ΩΛΈΛ≥Λ»ΛœΛ ΛΛΓΛΫ–»·≈άΛ»ΫΣΟε≈άΛΈ ΩΕ―ΛΈΖΙΛ≠ΛρΜ»ΛΟΛΤΛΛΛκΛΈΛ«ΛΔΛκΓΞ Λ≥ΛΈΦΑΛΈΞΛΞαΓΦΞΗΛœΓΛΩό5ΛΈΦ®ΛΙΛ»Λ≥ΛμΛ«ΛΔΛκΓΞΞΣΞΛΞιΓΦΥΓΛ«ΛœΓΛΕη¥÷ΛΈ ΩΕ―ΛΈΖΙΛ≠ΛρΫ–»·≈άΛάΛ±Λ«ΖηΛαΛΤΛΛΛΩΛ§ΓΛΞέΞΛΞσΥΓΛœΈΨΟΦΛ«ΖηΛαΛΤΛΛΛκΛΈΛ«ΛΔΛκΓΞΛ≥ΛλΛΥ ΛηΛξΓΛΖΉΜΜάΚ≈ΌΛ§ΗΰΨεΛΙΛκΛΈΛ«ΛΔΛκΓΞ
![\includegraphics[keepaspectratio, scale=1.0]{figure/RK2_1.eps}](img58.png)
|
2.2.1.2 άΚ≈ΌΛΈΗΓΨΎ
ΛηΛ·ΗΪΛκΛ»ΓΛΛ≥ΛΈΦΑ(17)ΛœΓΛΥή≈ωΛΥ2ΦΓΛΈάΚ≈ΌΛ ΛΈΛΪ?ΓΛΛ»ΒΩΧδΛ§Ά·Λ·ΓΞΛόΛΚΛœΓΛΨ·Λ Λ·Λ»Λβ2ΦΓΛΈάΚ≈ΌΛ§ΛΔΛκΛ≥Λ»Λρ≥Έ«ßΛ«ΛΔΛκΓΞΝ≤≤ΫΦΑΛœΓΛ
Λ» ―ΖΝΛ«Λ≠ΛκΓΞΛ≥ΛΈΖκ≤ΧΛœΓΛΛόΛΒΛΥΦΑ(7)Λ»Τ±ΛΗΖΝΛρΛΖΛΤΛΣΛξΓΛΨ·Λ Λ·Λ»Λβ 2ΦΓΛΈάΚ≈ΌΛ§ΛΔΛκΛ≥Λ»Λ§≥Έ«ßΛ«Λ≠ΛκΓΞ
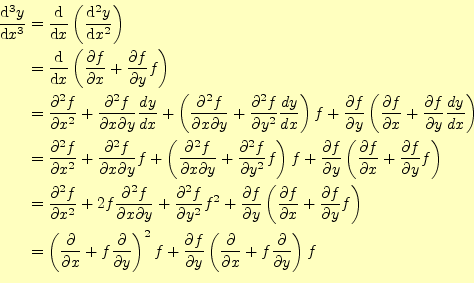
ΦΓΛΥ3ΦΓΛΈάΚ≈ΌΛ§Λ ΛΛΛ≥Λ»ΛρΦ®ΛΙΓΞΞΤΞΛΞιΓΦ≈Η≥ΪΛΈ3ΦΓΛΈΙύΛœΓΛΖΗΩτΛœΧΒΜκΛΙΛκΛ»ΓΛ
Λ»Λ Λκ4ΓΞ
Αλ ΐΓΛΞέΞΛΞσΥΓΛΈ3ΦΓΛΈάΚ≈ΌΛρ…ΫΛΙΛΈΛœΓΛΦΑ(18)ΛΈ±Π ’ΛΈΞΤ ΞΛΞιΓΦ≈Η≥ΪΛΈ2ΦΓΛΈΙύΛ«ΛΔΛκΓΞΛ≥ΛλΛœΓΛ
Λ»Λ ΛκΓΞ
ΧάΛιΛΪΛΥΓΛΞΤΞΛΞιΓΦ≈Η≥ΪΛΈ3ΦΓΛΈΙύΛ«ΛΔΛκΦΑ(19)Λ»ΞέΞΛ ΞσΥΓΛΈ3ΦΓΛΈΙύΛΈΦΑ(20)ΛœΑέΛ ΛΟΛΤΛΛΛκΓΞΛΖΛΩΛ§ΛΟΛΤΓΛΞέΞΛ ΞσΥΓΛœ3ΦΓΛΈάΚ≈ΌΛ§Λ ΛΛΛ≥Λ»Λ§ §ΛΪΛκΓΞΨ·Λ Λ·Λ»Λβ2ΦΓΛΈάΚ≈ΌΛ§ΛΔΛΟΛΤΓΛ3ΦΓΛΈάΚ≈ΌΛ§Λ ΛΛ Λ≥Λ»Λ§Φ®ΛΒΛλΛοΛ±Λ«ΓΛΞέΞΛΞσΥΓΛœ2ΦΓΛΈάΚ≈ΌΛ«ΛΔΛκΛ≥Λ»Λ§ΨΎΧάΛΒΛλΛΩΛ≥Λ»ΛΥΛ ΛκΓΞ
2.2.2 Οφ≈άΥΓ
2.2.2.1 Ν≤≤ΫΦΑ
Λ≥ΛλΛβΓΛΞέΞΛΞσΥΓΛ»Τ±ΛΗ2ΦΓΛΈάΚ≈ΌΛ«ΛΔΛκΓΞΞέΞΛΞσΥΓΛœΕη¥÷ΛΈΈΨΟΦΛΈ≈άΛΈΤ≥¥ΊΩτ ΛρΜ»ΛΟΛΩΛ§ΓΛΟφ≈άΥΓΛœΫ–»·≈άΛ»Οφ≈άΛ«Ν≤≤ΫΦΑΛρΚνΛκΓΞάηΛέΛ…Τ±ΆΆΓΛ2≈άΛρΜ»ΛΠΛΈΛ«ΓΛ2ΦΓΛΈάΚ≈Ό ΛΥΛΙΛκΛ≥Λ»Λ§Λ«Λ≠ΛκΓΞΞέΞΛΞσΥΓΛΈΦΑ(14)ΛΥ¬–±ΰΛΙΛκΛβΛΈΛœΓΛ
Λ«ΛΔΛκΓΞΛ≥ΛλΛρ
 |
(22) |
Λ»Λ ΛκΓΞΛ≥ΛλΛρΓΛΦΑ(13)Λ»»φ≥”ΛΙΛκΛ»ΓΛ
 |
Λ»Λ Λκ…§ΆΉΛ§ΛΔΛκΓΞΛΖΛΩΛ§ΛΟΛΤΓΛΟφ≈άΥΓΛΈΝ≤≤ΫΦΑΛœΓΛ
Λ»Λ ΛκΓΞΛ≥ΛΈΗχΦΑΛΈΞΛΞαΓΦΞΗΛρΓΛΩό6ΛΥΦ®ΛΖΛΤΛΣΛ·ΓΞ
2.2.2.2 άΚ≈ΌΛΈΗΓΨΎ
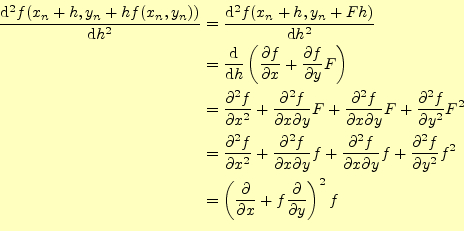
ΦΑ(18)Λ»Τ±ΛΗΦξΫγΛ«ΛρΆ―ΛΛΛκΛ≥Λ»ΛΥΛηΛξΓΛΟφ≈άΥΓΛ§2ΦΓΛΈάΚ ≈ΌΛ«ΛΔΛκΛ≥Λ»Λ§ΨΎΧάΛ«Λ≠ΛκΓΞΝ≤≤ΫΦΑΛρΞΤΓΦΞιΓΦ≈Η≥ΪΛΙΛκΛ»ΓΛ
Λ§Τ≥ΛΪΛλΛκΓΞΞέΞΛΞσΥΓΛΈΨλΙγΛ»Τ±ΆΆΓΛΛ≥ΛλΛœΓΛΦΑ(7)ΛΈ2ΦΓΛΈ…τ §ΛόΛ«≈υ ΛΖΛΛΛΈΛ«ΓΛΨ·Λ Λ·Λ»Λβ2ΦΓΛΈάΚ≈ΌΛ§ΛΔΛκΛ≥Λ»Λ§ §ΛΪΛκΓΞΑλ ΐΓΛ3ΦΓΛΈάΚ≈ΌΛ§Λ ΛΛ Λ≥Λ»ΛœΓΛΑ ≤ΦΛΈΡΧΛξΧάΛιΛΪΛ«ΛΔΛκΓΞΦΑ(20)Λ»»φΛΌ ΛΤΓΛ»υΨ° ―ΑΧ

Λ»ΡΨΛΝΛΥΤ≥Λ·Λ≥Λ»Λ§Λ«Λ≠ΛκΓΞΛ≥ΛλΛœΓΛΦΑ(19)Λ»ΑέΛ ΛξΛό ΛΙΛΈΛ«ΓΛ3ΦΓΛΈάΚ≈ΌΛ§Λ ΛΛΛ≥Λ»Λ§ΛœΛΟΛ≠ΛξΛΖΛΤΛΛΛκΓΞ
![\includegraphics[keepaspectratio, scale=1.0]{figure/RK2_2.eps}](img75.png)
2.3 4ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΥΓ
ΚΘΛόΛ«Φ®ΛΖΛΩΞΣΞΛΞιΓΦΥΓΛδ2ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΥΓΛΈΛηΛΠΛΥΓΛΞ―ΞιΞαΓΦΞΩΓΦΛρΝΐΛδΛΖΛΤΗμ ΚΙΙύΛΈΦΓΩτΛρΨεΛ≤ΛΤΛΛΛ· ΐΥΓΛ«ΓΛΚ«Έ…ΛΈ ΐΥΓΛ»ΗάΛοΛλΛκΛΈΛ§4ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΥΓΛ«ΛΔ ΛκΓΞΞ―ΞιΞαΓΦΞΩΓΦΛρΝΐΛδΛΖΛΤΓΛ5, 6, 7,
Λ»ΛΛΛΠΛ≥Λ»Λ«ΓΛ≥ßΛΒΛσΛ§Ψο»υ § ΐΡχΦΑΛρΖΉΜΜΛΙΛκ…§ΆΉΛ§άΗΛΗΛΩΛ»Λ≠ΛœΓΛ≤ΩΛœΛ»ΛβΛΔΛλ4ΦΓ
ΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΛ«ΖΉΜΜΛΙΛΌΛ≠Λ«ΛΔΛκΓΞΓ÷Λ≥ΛΈΧδ¬ξΛρ≤ρΛ·ΨλΙγΓΛ4ΦΓΛΈΞκΞσΞ≤Ξ·ΞΟΞΩΛάΛ ΓΉ
Λ»ΑλΗάΛΛΛΟΛΤΞΉΞμΞΑΞιΞύΛρΫώΛ≠ΜœΛαΛκΛ»ΓΛΛΣΛΧΛΖΛ«Λ≠ΛκΛ --Λ»ΜΉΛοΛλΛκΛ≥Λ»¥÷ΑψΛΛΛ ΛΖ
Λ«ΛΔΛκΓΞ¥÷ΑψΛΟΛΤΛβΓ÷2ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩ![]() ΓΉΛ»ΗάΛΟΛΤΛœΛ ΛιΛ ΛΛΓΞΓ÷4ΦΓΛΈ ΐ
Λ§
ΓΉΛ»ΗάΛΟΛΤΛœΛ ΛιΛ ΛΛΓΞΓ÷4ΦΓΛΈ ΐ
Λ§![]() ΓΉΛ»ΗάΛΠ«ΎΛ§…§ΛΚΛ«ΛΤΛ·ΛκΓΞ…αΡΧΛΈ≤ ≥ΊΛΥΖ»ΛοΛκΦ‘ΛΥΛ»ΛΟΛΤΓΛ4ΦΓΛΈΞκΞσΞ≤ΓΠ
Ξ·ΞΟΞΩΛœΨο»υ § ΐΡχΦΑΛΈΚ«ΫιΛ«Κ«ΗεΛΈ≤ρΥΓΛ«ΛΔΛκΓΞ
ΓΉΛ»ΗάΛΠ«ΎΛ§…§ΛΚΛ«ΛΤΛ·ΛκΓΞ…αΡΧΛΈ≤ ≥ΊΛΥΖ»ΛοΛκΦ‘ΛΥΛ»ΛΟΛΤΓΛ4ΦΓΛΈΞκΞσΞ≤ΓΠ
Ξ·ΞΟΞΩΛœΨο»υ § ΐΡχΦΑΛΈΚ«ΫιΛ«Κ«ΗεΛΈ≤ρΥΓΛ«ΛΔΛκΓΞ
ΛΩΛάΛΖΓΛ4ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΥΓΛηΛξΛβάΚ≈ΌΛΈΈ…ΛΛ ΐΥΓΛ§ΛΔΛκΛ≥Λ»ΛβΟΈΛΟΛΤΛΣΛ·…§ΆΉΛ§ΛΔ ΛκΓΞΛηΛξΙβάΚ≈ΌΛ ΐΥΓΛ»ΛΖΛΤΓΛBulirsch-StoreΥΓΛδΆΫ¬§Μ“ΓΠΫΛάΒΥΓΛ Λ…Λ§ΛΔΛκΓΞΩ ΛσΛά ΌΕ·Λρ ΛΖΛΩΛΛΛ»Λ≠ΛΥΓΛ≥ΊΫ§ΛΙΛκΛΈΛ§ΛηΛΛΛάΛμΛΠΓΞΈψΛ®Λ– ΗΗΞ [1]≈υΛΥΨήΛΖΛ·ΛΪΛΪΛλΛΤΛΛ ΛκΓΞ
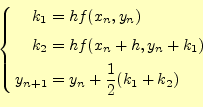
4ΦΓΛΈΞκΞσΞ≤ΓΠΞ·ΞΟΞΩΛΈΗχΦΑΛœΓΛΦΑ(27)ΛΥΦ®ΛΙΡΧΛξΛ«ΛΔΛκΓΞΛΫΛΖΛΤΓΛΛ≥Λλ ΛΈΞΛΞαΓΦΞΗΛœΩό7ΛΈΛηΛΠΛΥ…ΫΛΙΛ≥Λ»Λ§Λ«Λ≠ΛκΓΞ
2ΦΓΛΈΨλΙγΛ»Τ±ΛΗΦξΫγΛ«ΓΛΗχΦΑΛρΤ≥Λ≠ΓΛΛΫΛΖΛΤ4ΦΓΛΈάΚ≈ΌΛ«ΛΔΛκΛ≥Λ»Λ§ΨΎΧάΛ«Λ≠ΛκΛ«ΛΔΛμΛΠΓΞ ΛΖΛΪΛΖΓΛΖΉΜΜΛœΧάΛιΛΪΛΥ¬γ ―Λ ΛΈΛ«ΓΛœ”ΈœΛΈΛΔΛκΩΆΛœΞ»ΞιΞΛΛΜΛηΓΞ
![\includegraphics[keepaspectratio, scale=1.0]{figure/RK4.eps}](img78.png)
|
ΞέΓΦΞύΞΎΓΦΞΗ: Yamamoto's laboratory
ΟχΦ‘: Μ≥ΥήΨΜΜ÷ Yamamoto Masashi
Ωά°18«·9Ζν5Τϋ