∂¶∆±∏¶µÊ
º¥¬–æŒø∂∆∞≤Ú¿œ(He•Ÿ•√•ª•Îõ°§He•Ÿ•√•ª•Î•’•È•Û•∏∏«ƒÍ)
ø∂∆∞§ŒÕÕª“
§≥§≥§«§Œ∑◊ªª§œ°§classic¥ƒ∂≠§«º¬ªÐ§∑§Þ§∑§ø°••Œ°º•…§Œ√Õ§Ú•’•°•§•Î§´§È∆…§þΩ–§∑§∆°§¬æ§Œ•◊•Ì•∞•È•ý§«ΩËÕ˝§π§Î§ø§·§«§π°•
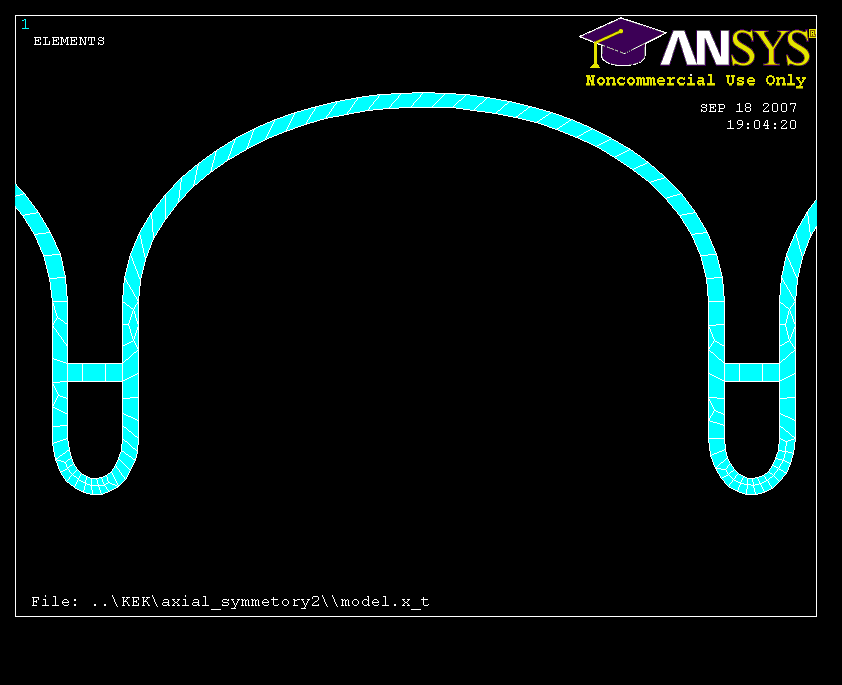
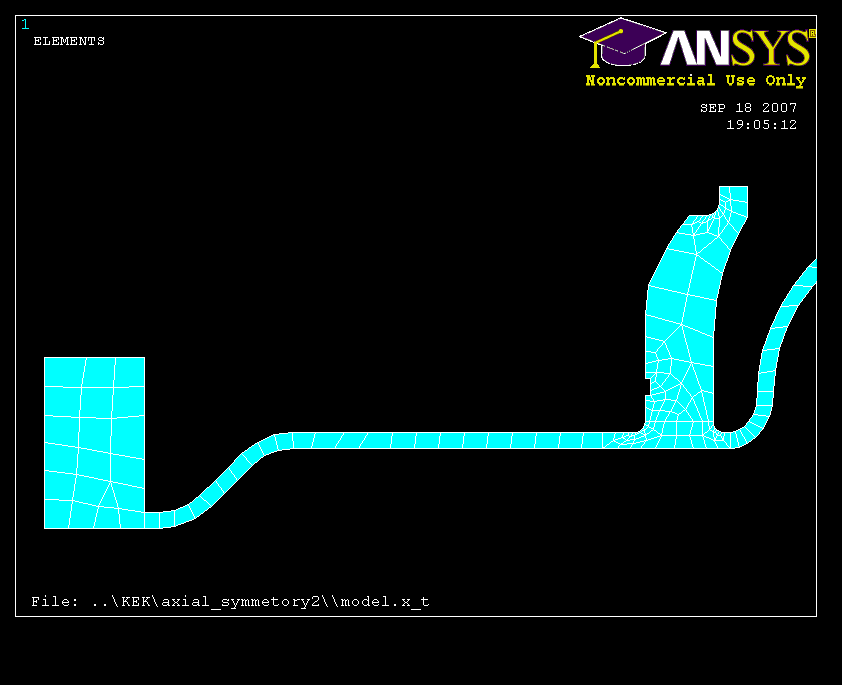
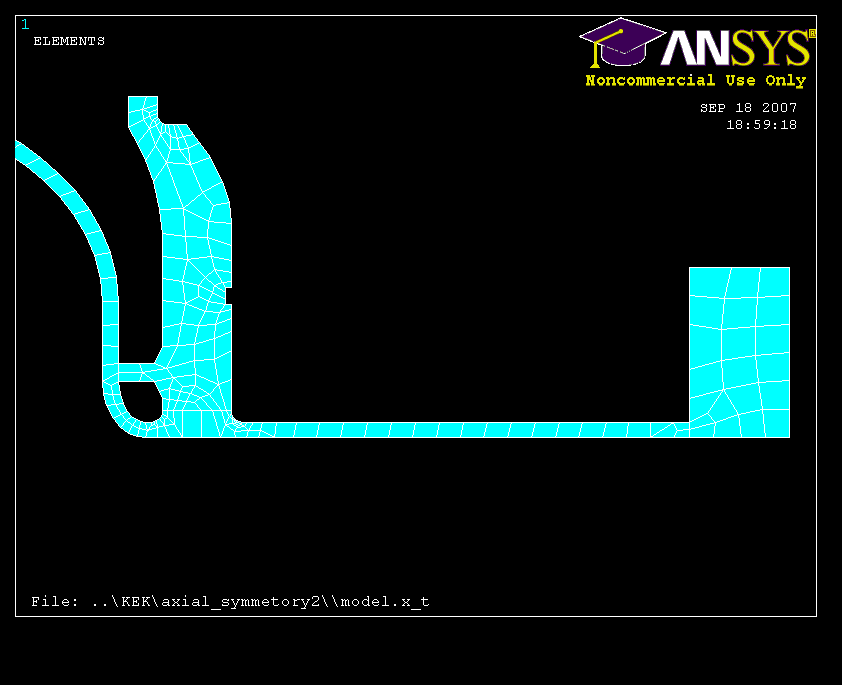
ƒ∂≈¡∆≥∂ı∆∂§Œµ°≥£ø∂∆∞§Œ•‚°º•…§Úº¥¬–æŒ∆Ûº°∏µ•‚•«•Î§«∑◊ªª§∑§Þ§∑§ø°•§≥§≥§«§œ°§He•Ÿ•√•ª•Î•’•È•Û•∏§Œ≥∞º˛…Ù§Ú∏«ƒÍ√º§»§∑§∆§§§Þ§π°•
§≥§Œ≤Ú¿œ§Úπ‘§√§ø§»§≠§Œ•·•√•∑•Â§ŒÕÕª“§œ°§º°§ŒƒÃ§Í§«§π°•∆±§∏∑◊ªª§ÚWorkbench¥ƒ∂≠§«§‚º¬ªÐ§∑§∆§§§Þ§π§¨°§•·•√•∑•Â§¨∞€§ §Í§Þ§π°•
{kind=link}
{kind=link}
{kind=link}
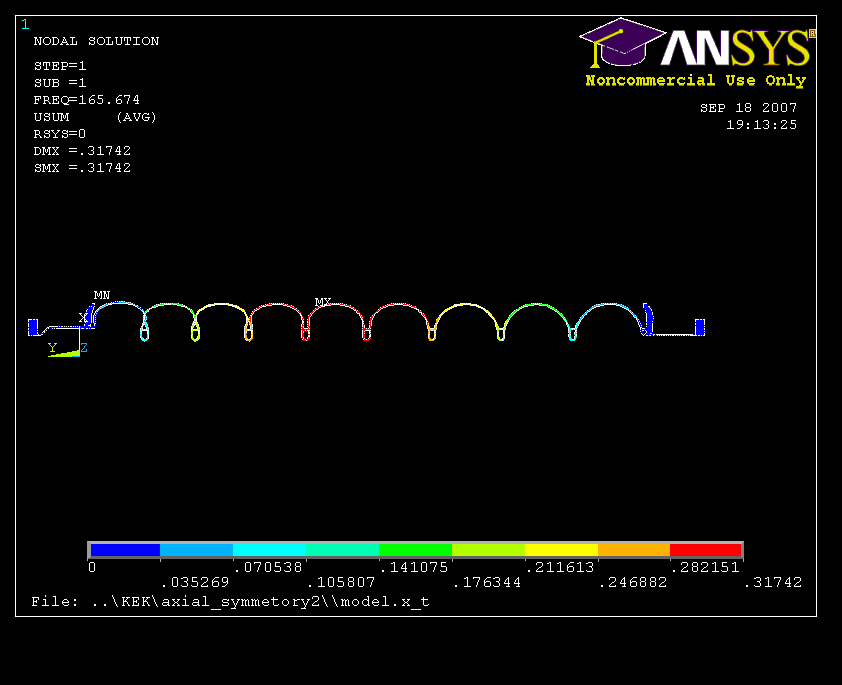
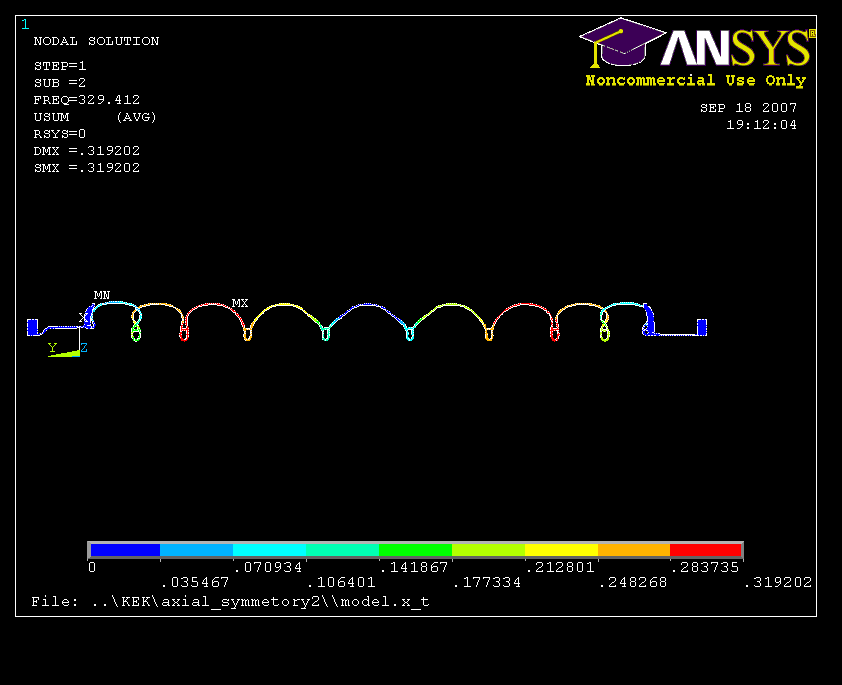
| •‚°º•…1 (165.67Hz) | •‚°º•…2 (329.41Hz) |
|
|
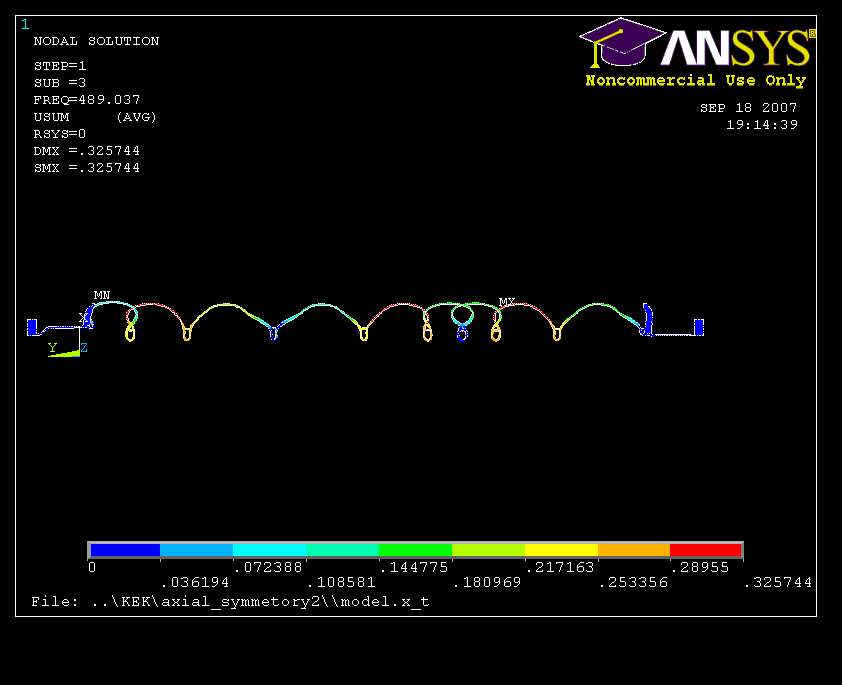
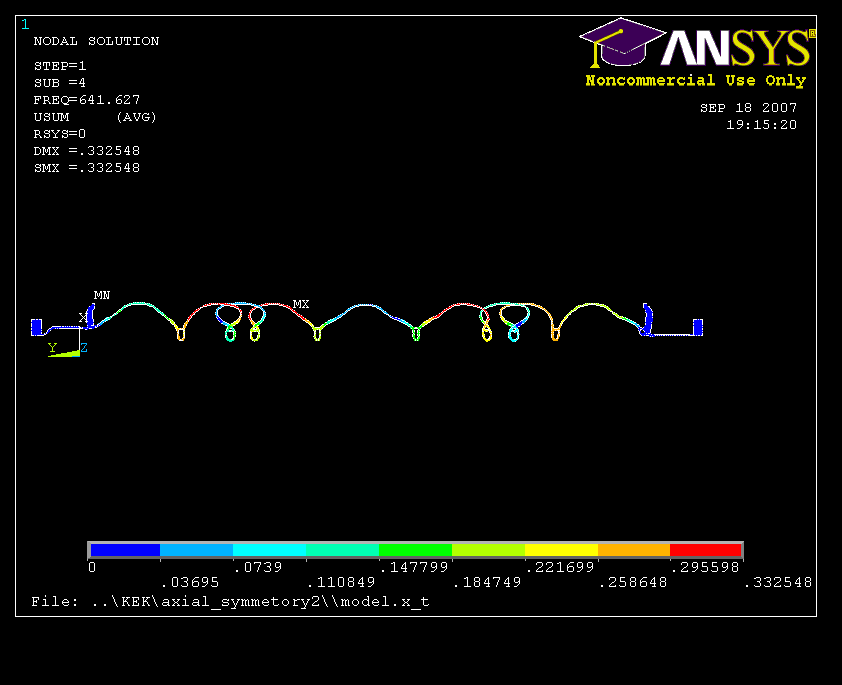
| •‚°º•…3 (489.04Hz) | •‚°º•…4 (641.63Hz) |
|
|
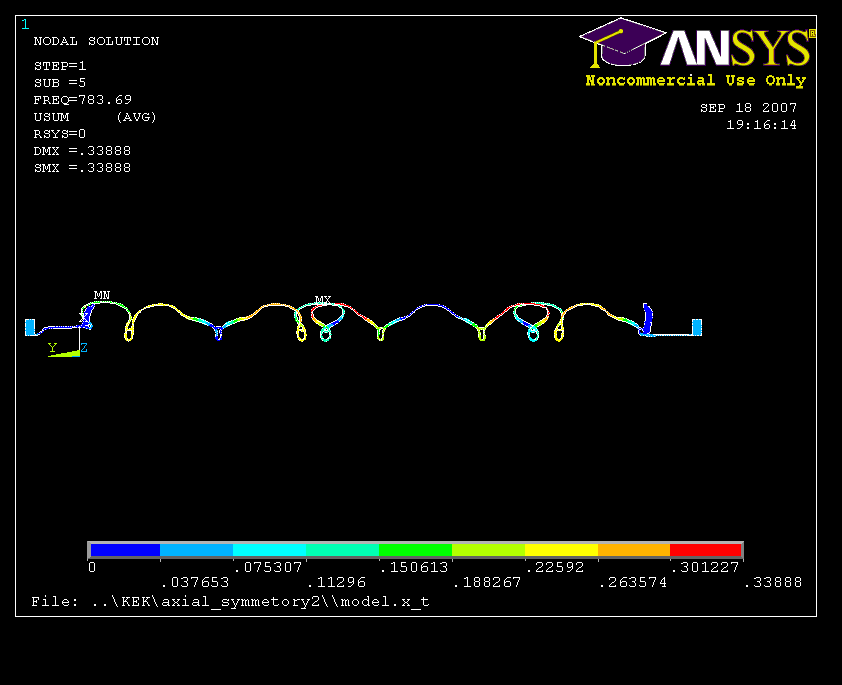
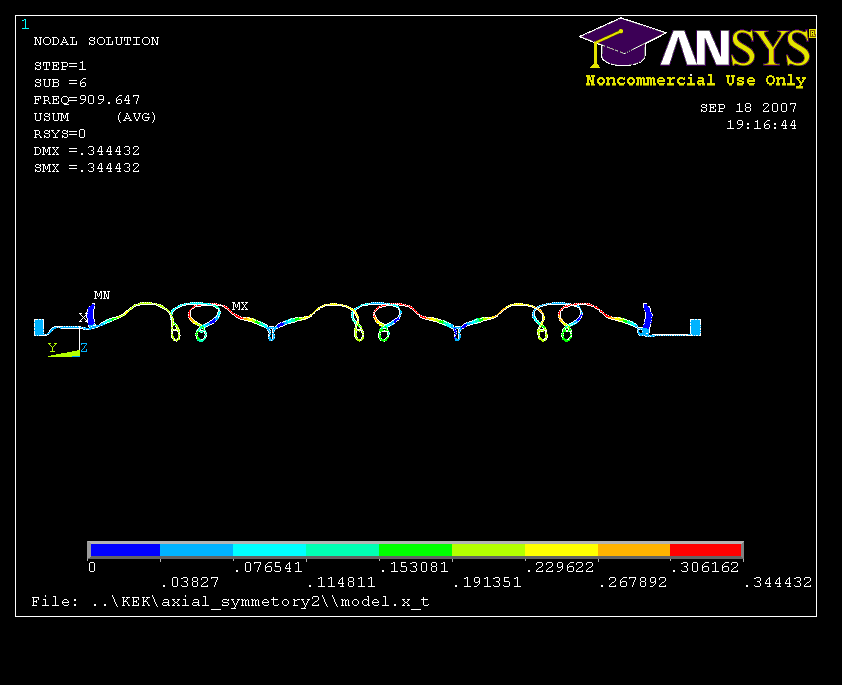
| •‚°º•…5 (783.69Hz) | •‚°º•…6 (909.65Hz) |
|
|
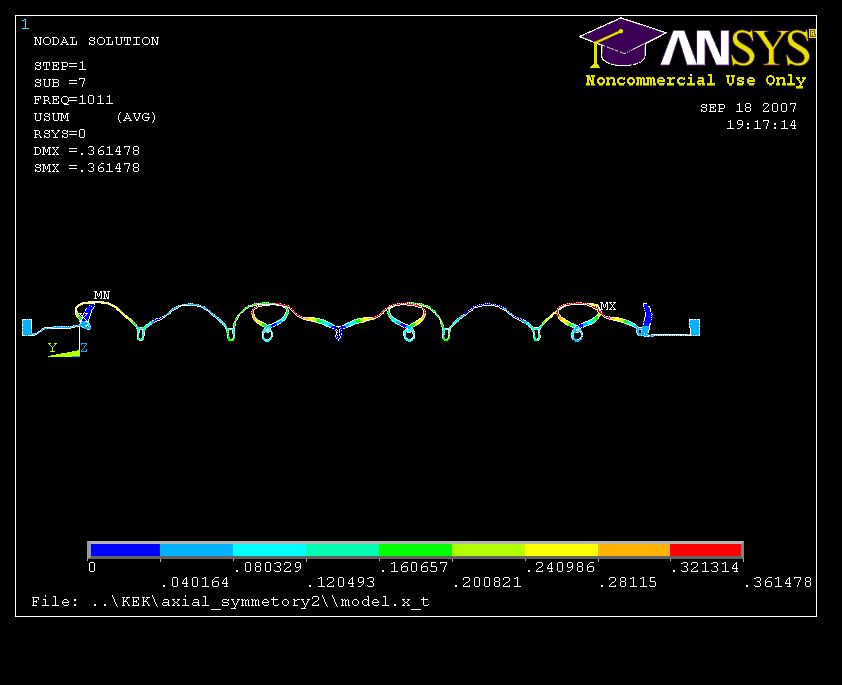
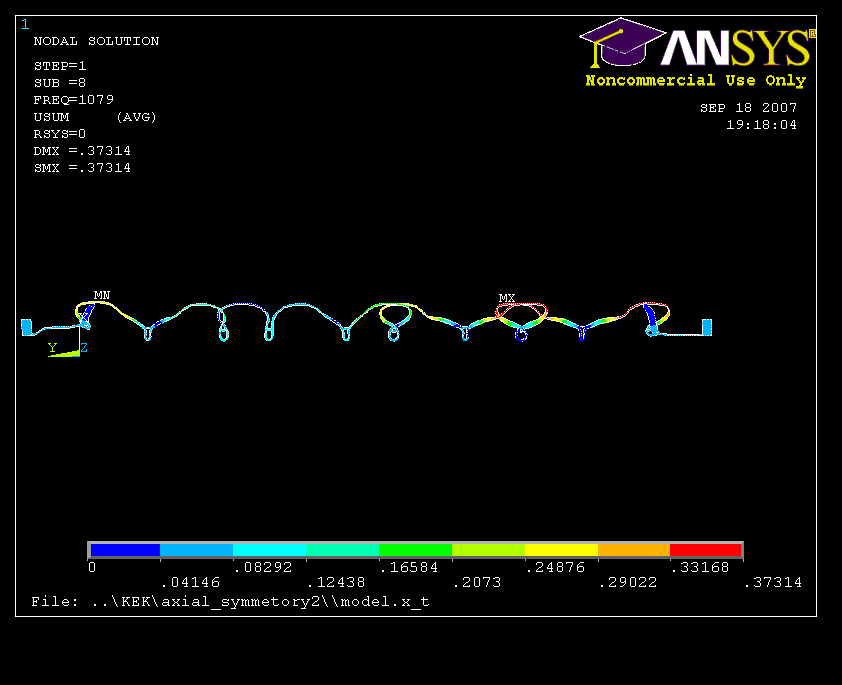
| •‚°º•…7 (1011.4Hz) | •‚°º•…8 (1079.5Hz) |
|
|
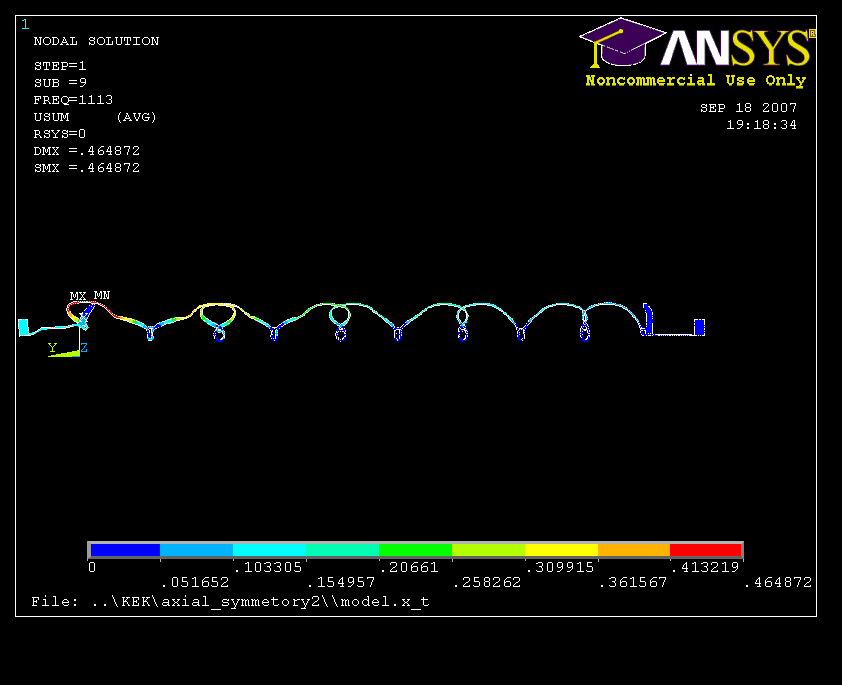
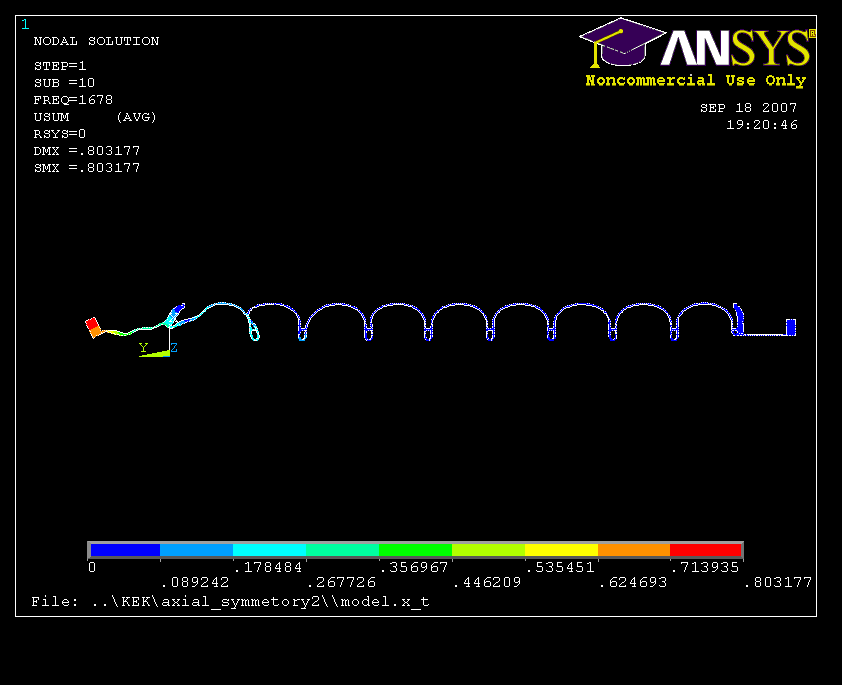
| •‚°º•…9 (1112.6Hz) | •‚°º•…10 (1677.9Hz) |
|
|
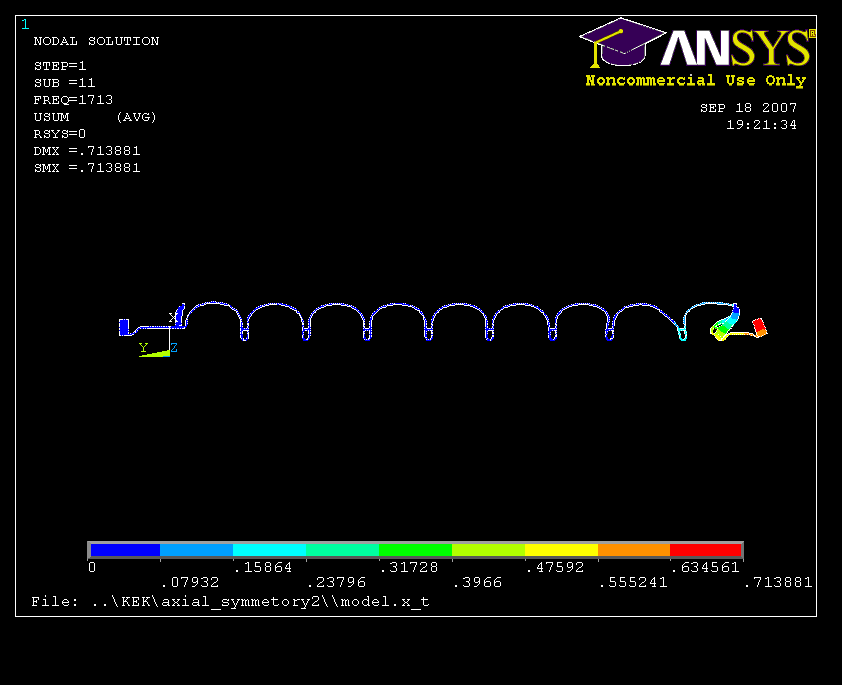
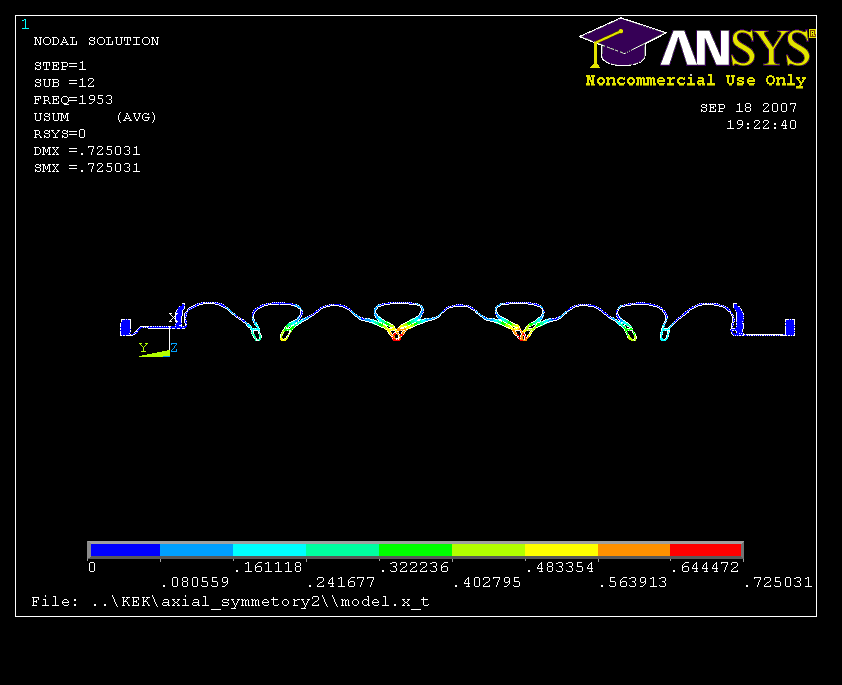
| •‚°º•…11 (1713.2Hz) | •‚°º•…12 (1953.4Hz) |
|
|
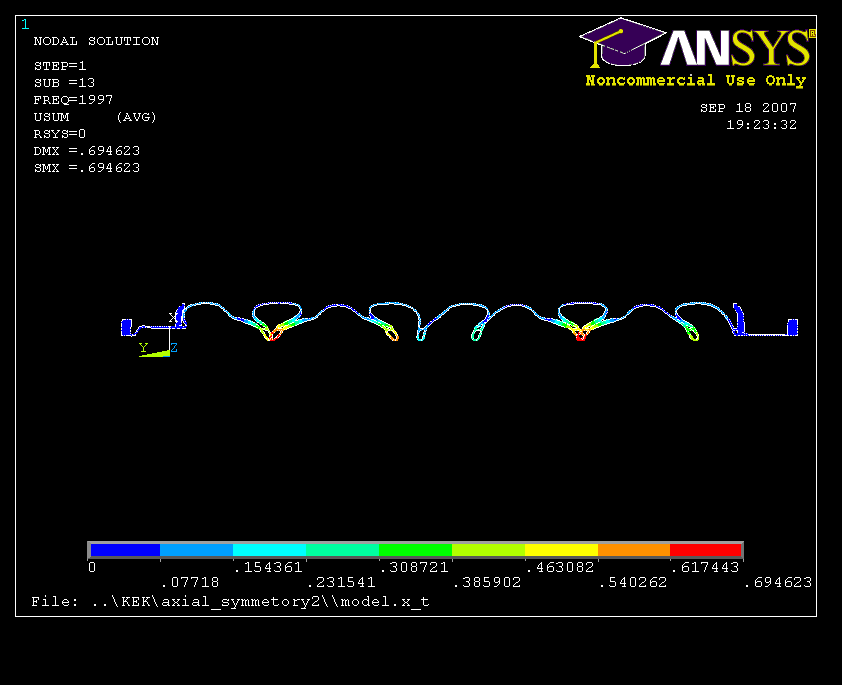
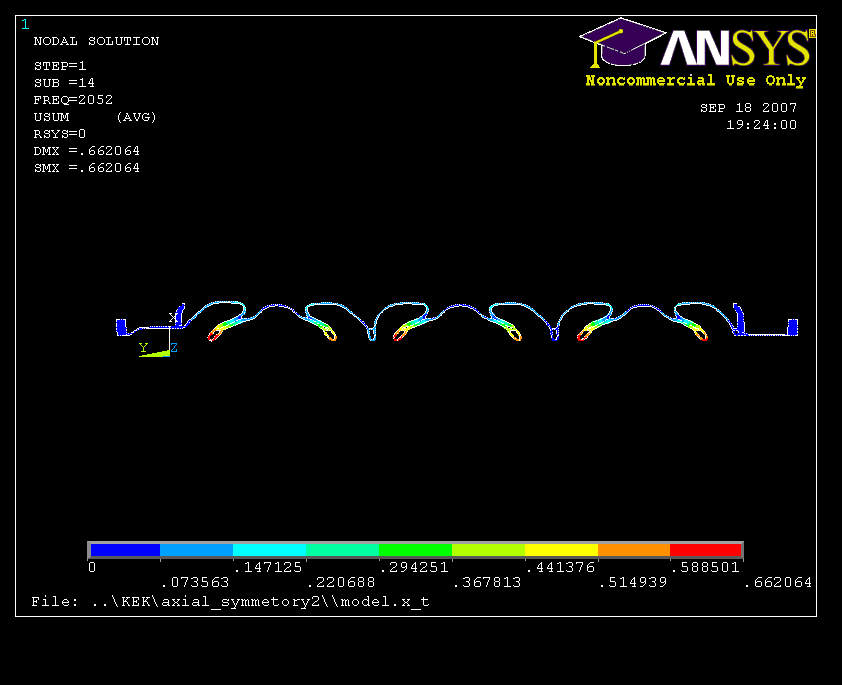
| •‚°º•…13 (1996.8Hz) | •‚°º•…14 (2052Hz) |
|
|
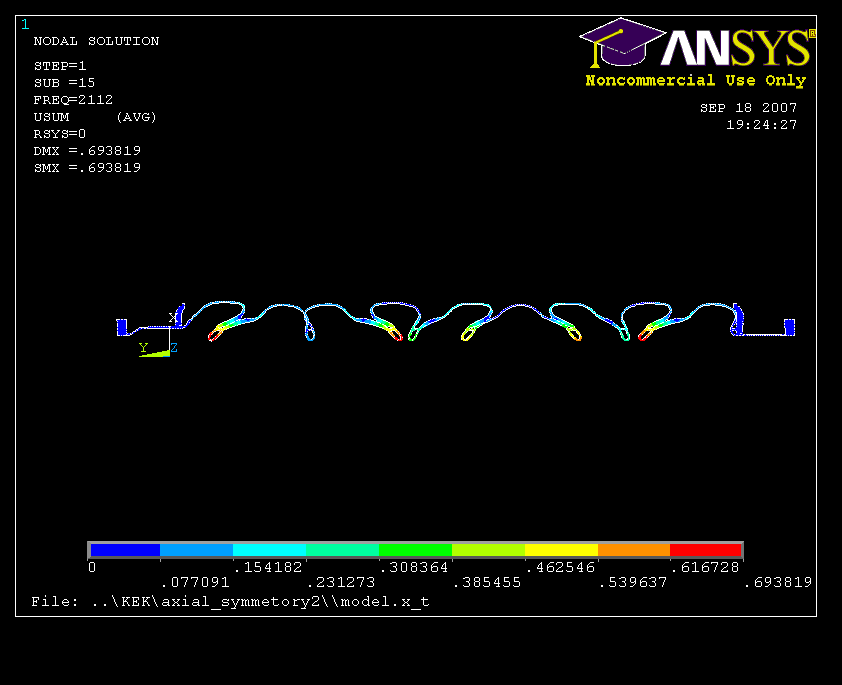
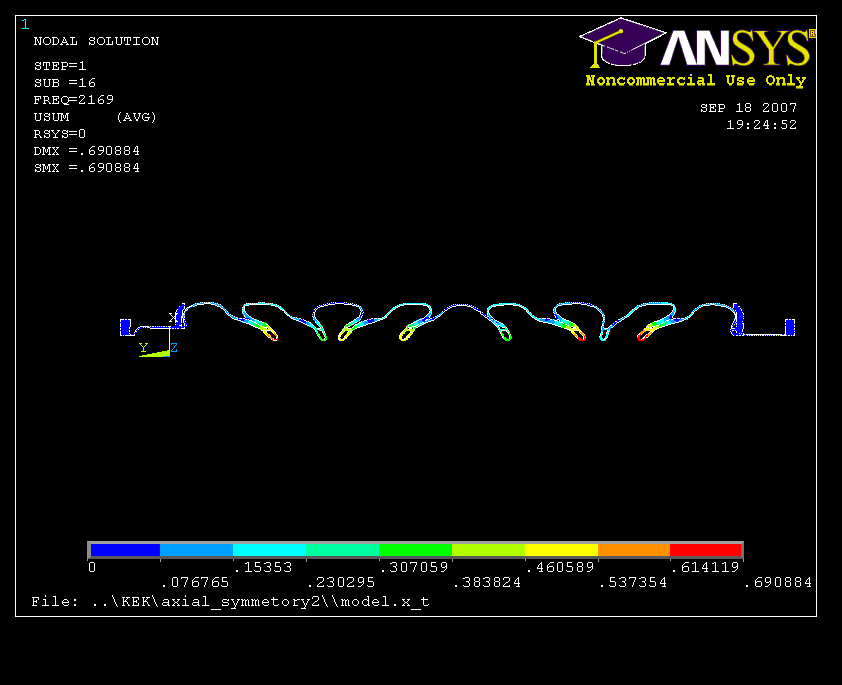
| •‚°º•…15 (2111.6Hz) | •‚°º•…16 (2168.8Hz) |
|
|
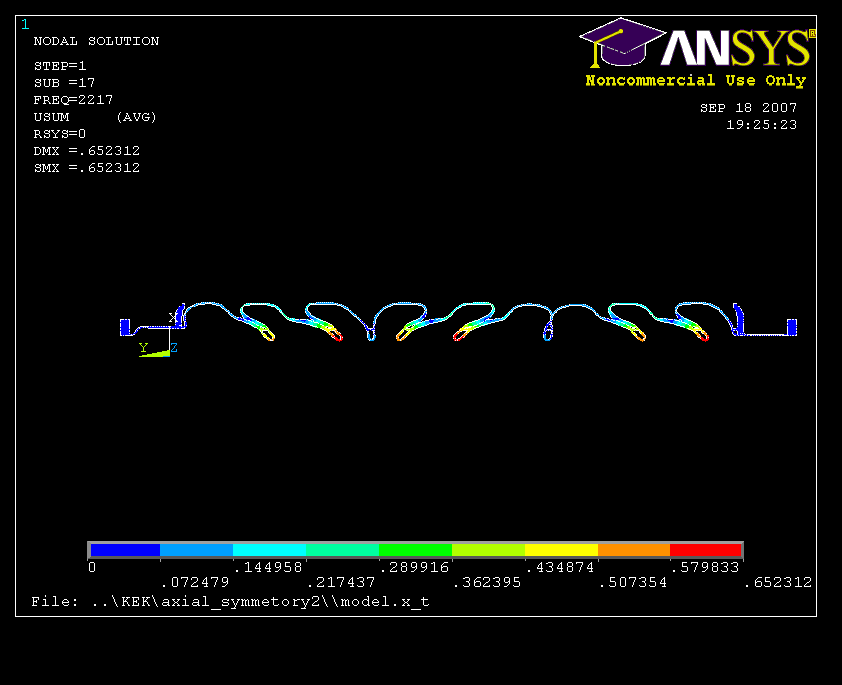
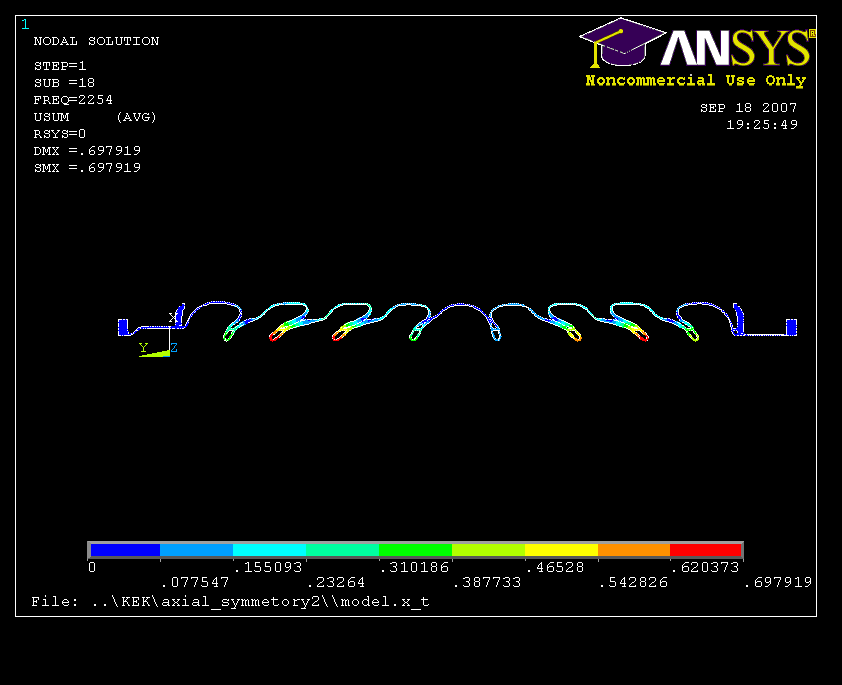
| •‚°º•…17 (2217.2Hz) | •‚°º•…18 (2254.3Hz) |
|
|
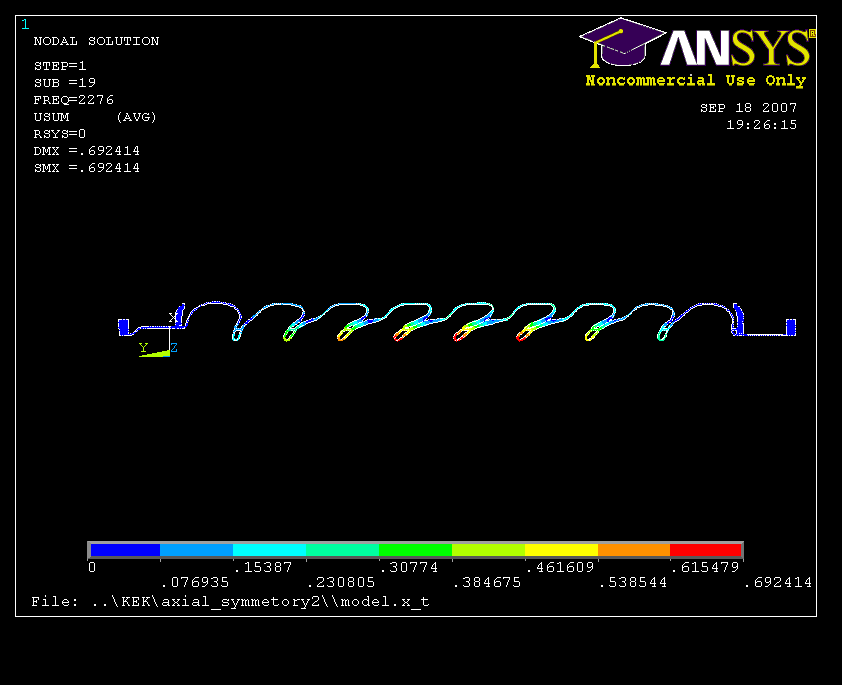
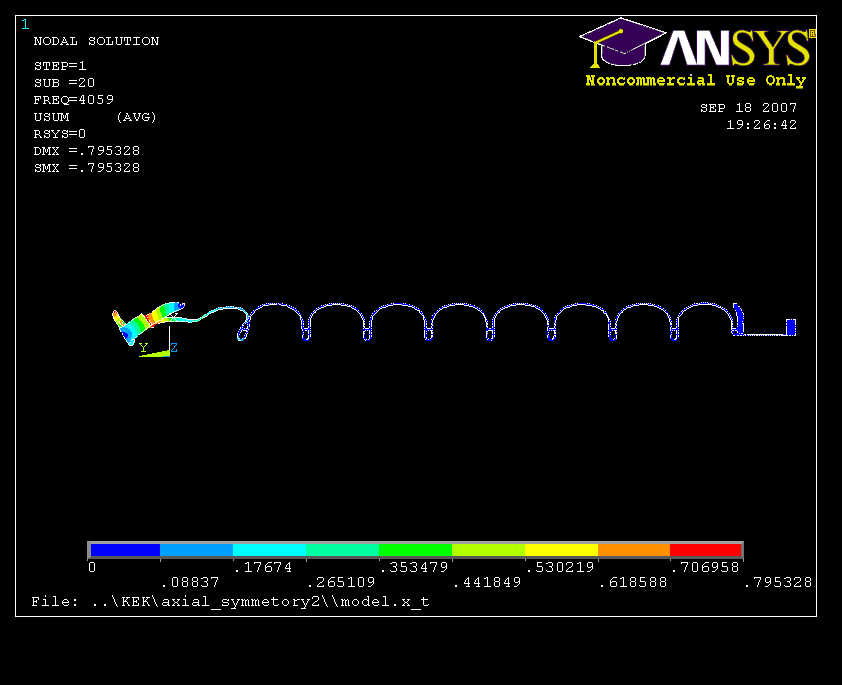
| •‚°º•…19 (2275.7Hz) | •‚°º•…20 (4059.1Hz) |
|
|
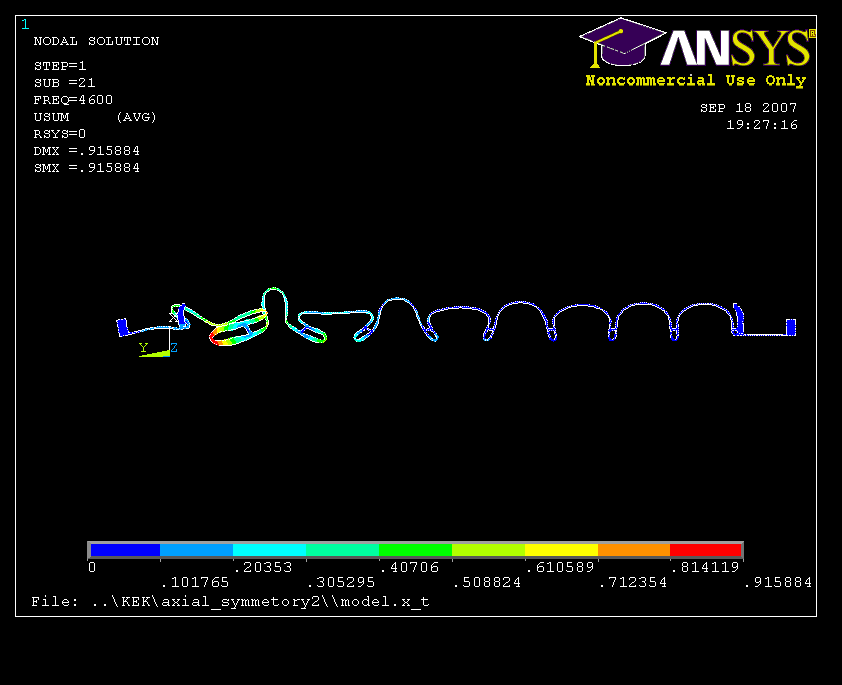
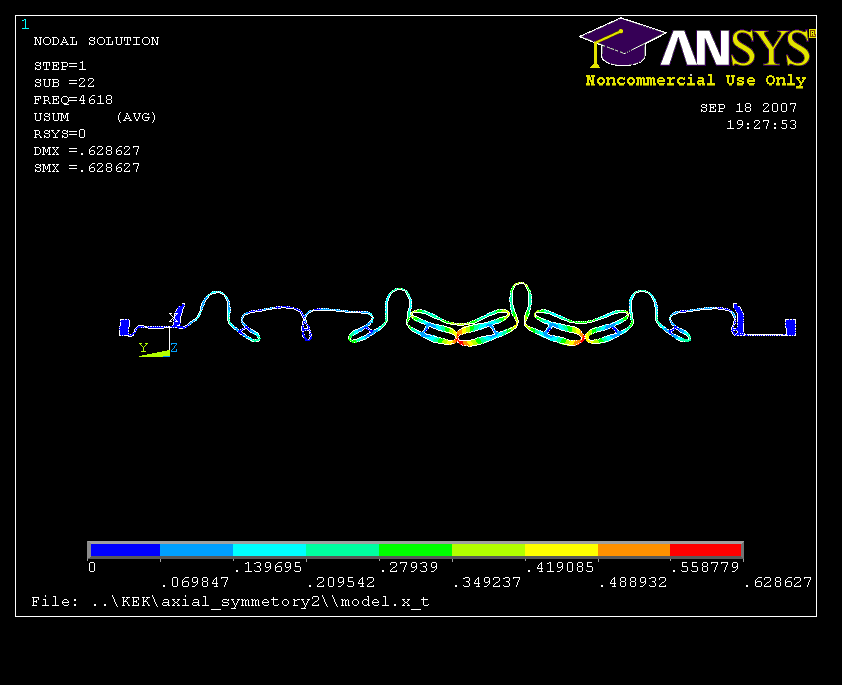
| •‚°º•…21 (4600.1Hz) | •‚°º•…22 (4617.8Hz) |
|
|
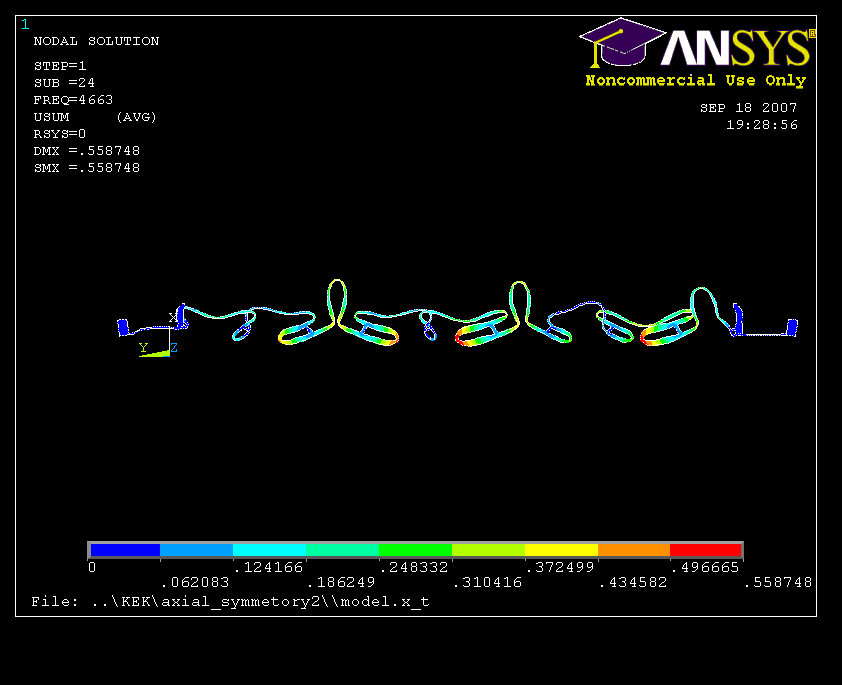
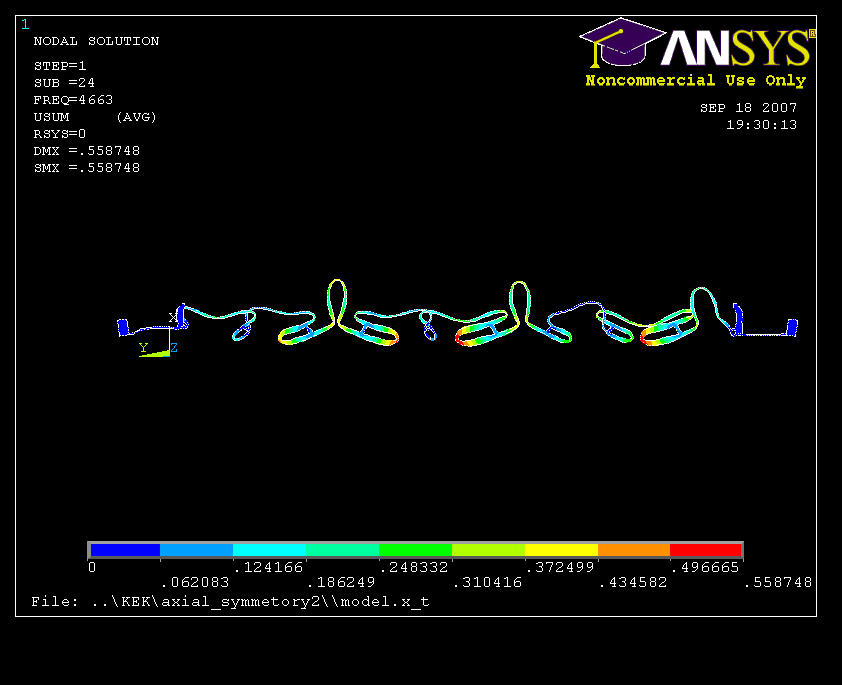
| •‚°º•…23 (4635.7Hz) | •‚°º•…24 (4663Hz) |
|
|
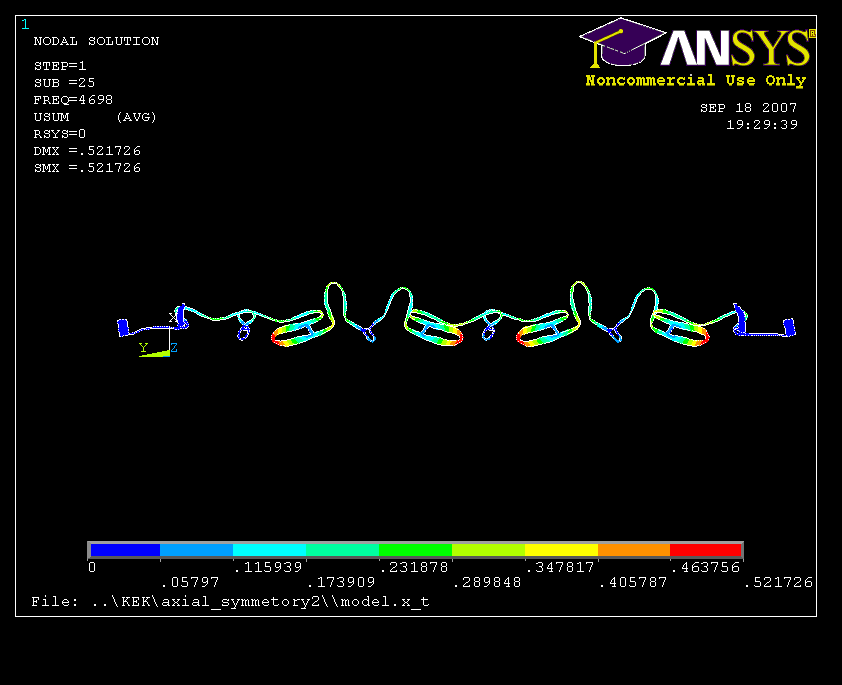
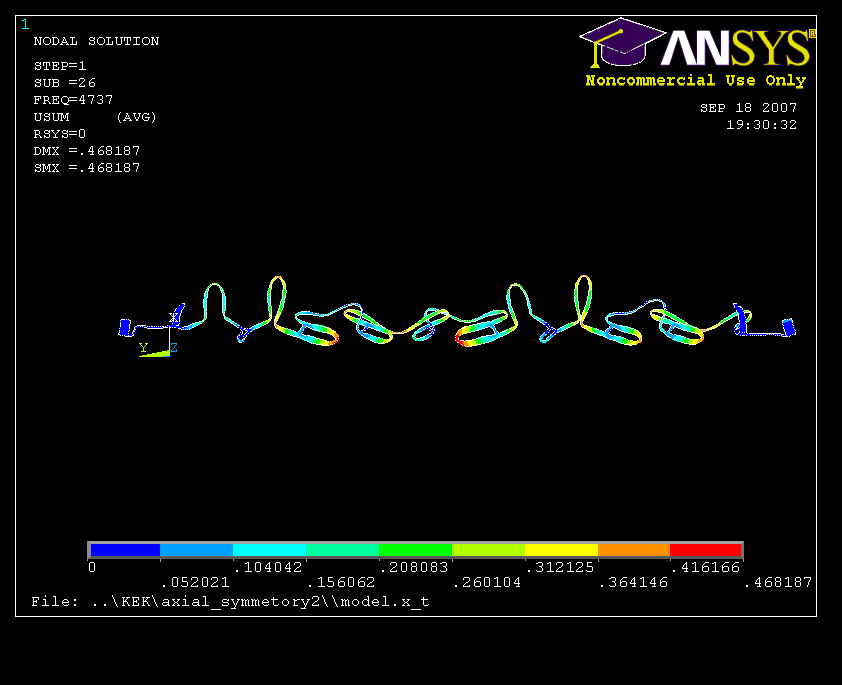
| •‚°º•…25 (4697.9Hz) | •‚°º•…26 (4736.6Hz) |
|
|
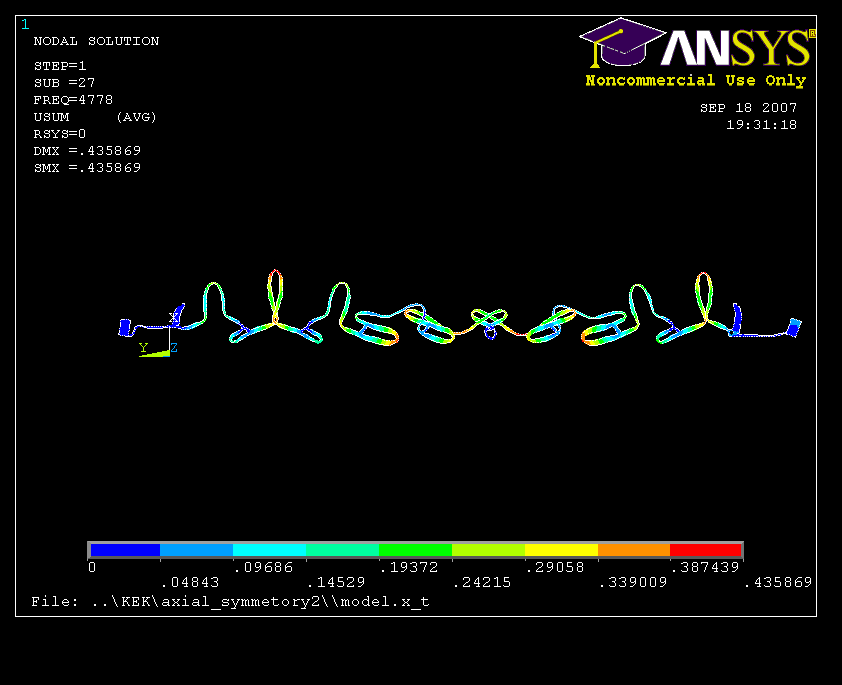
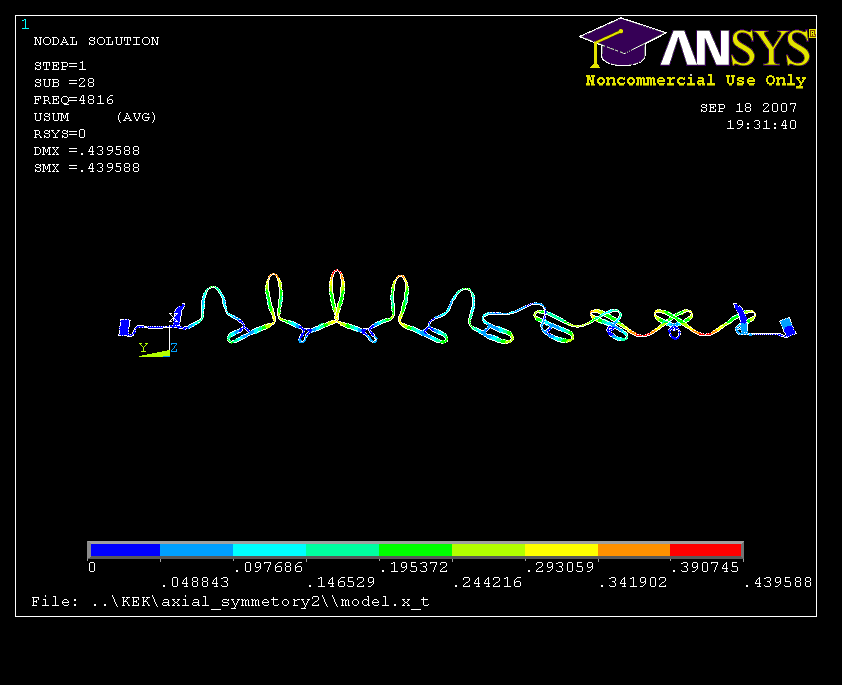
| •‚°º•…27 (4778Hz) | •‚°º•…28 (4815.8Hz) |
|
|
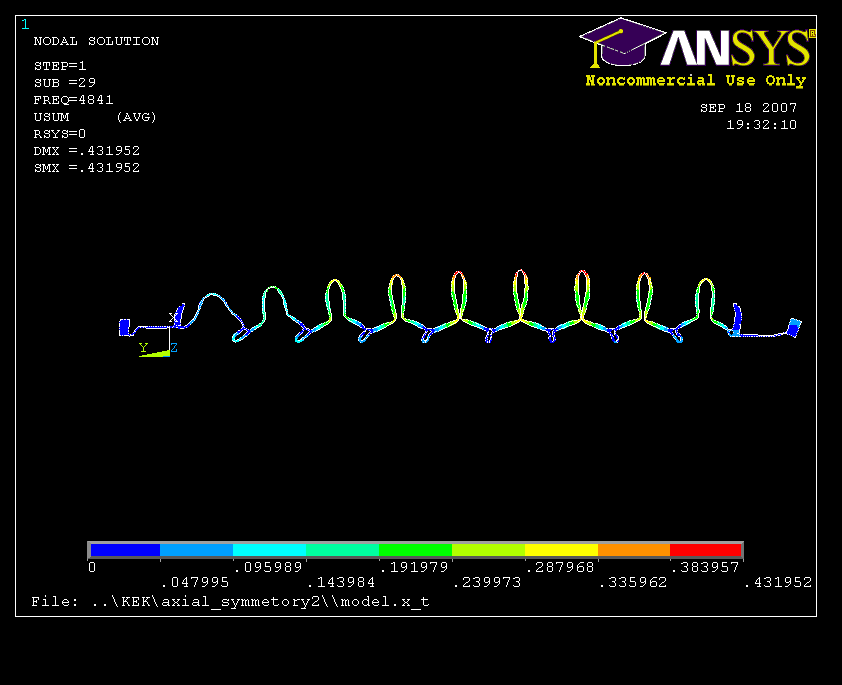
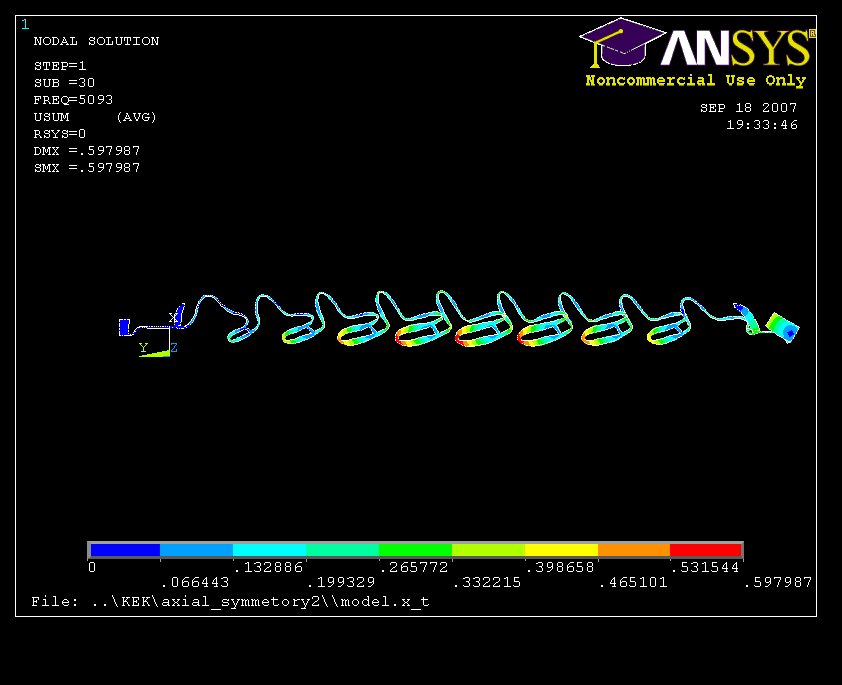
| •‚°º•…29 (4841.4Hz) | •‚°º•…30 (5093.1Hz) |
|
|
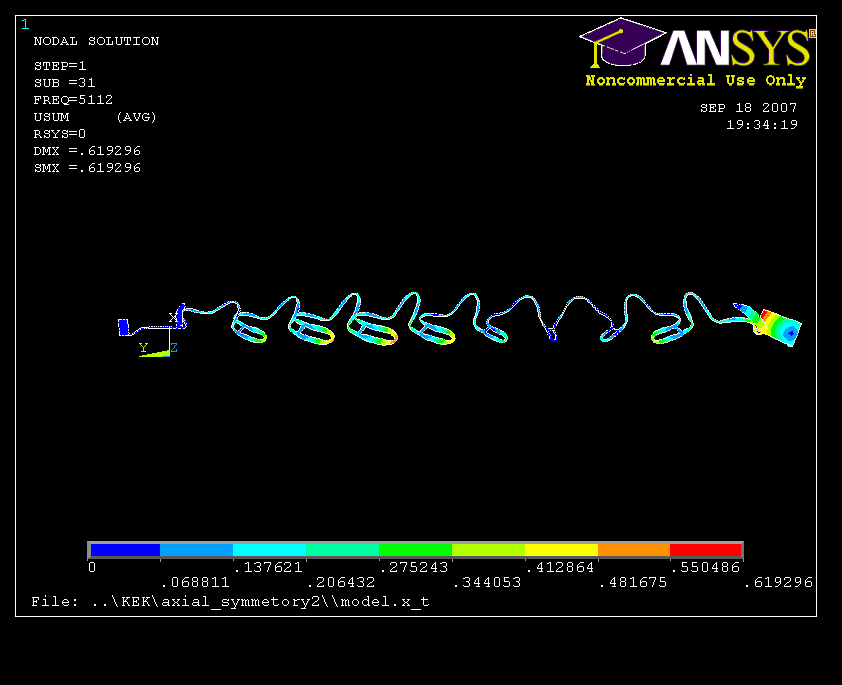
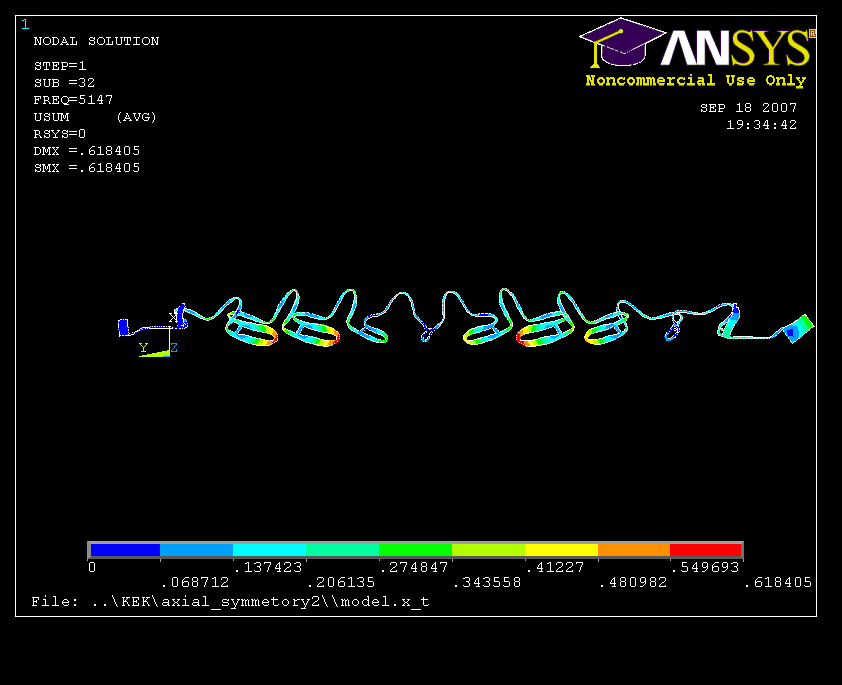
| •‚°º•…31 (5111.7Hz) | •‚°º•…32 (5147.2Hz) |
|
|
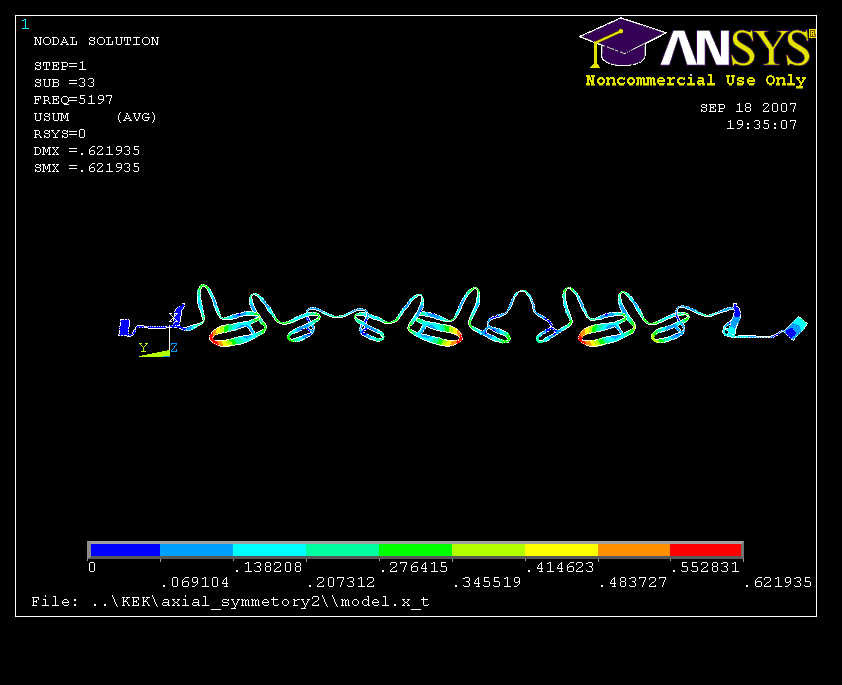
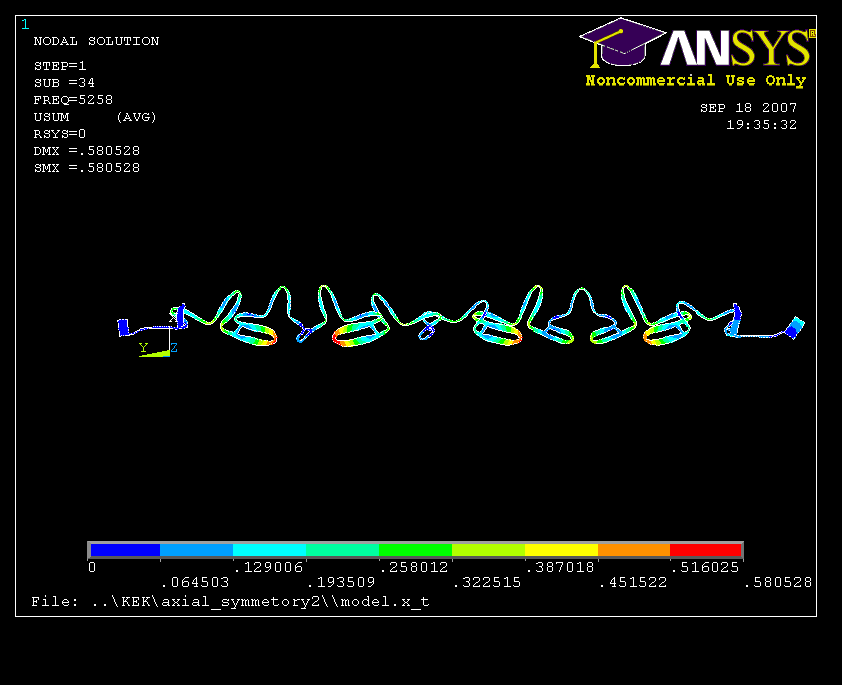
| •‚°º•…33 (5197.4Hz) | •‚°º•…34 (5257.9Hz) |
|
|
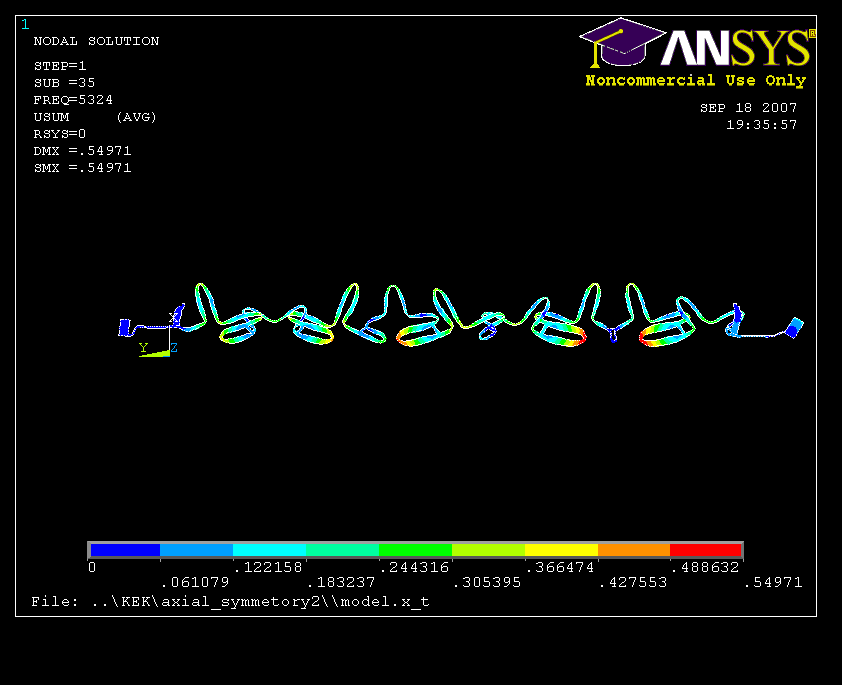
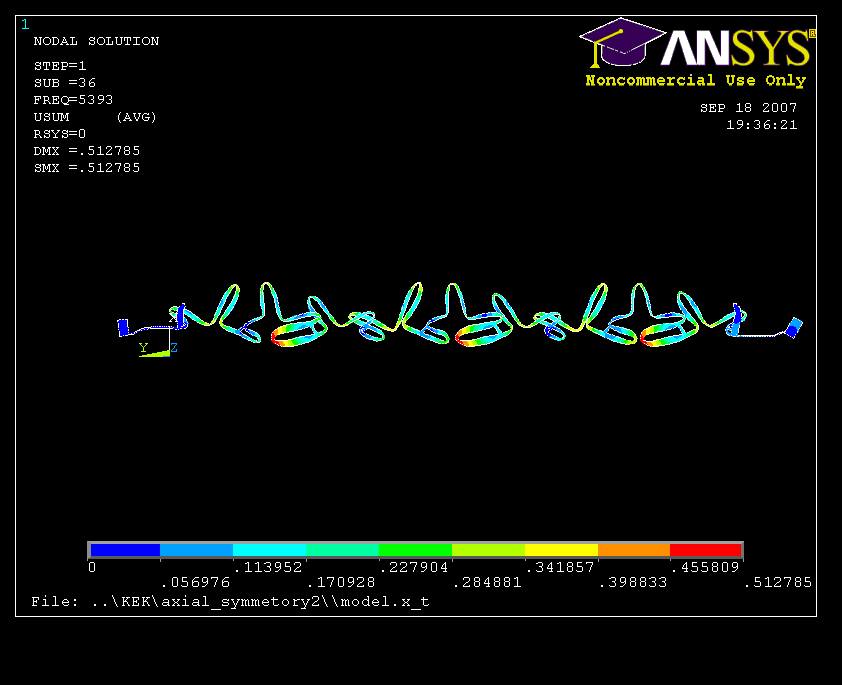
| •‚°º•…35 (5324.4Hz) | •‚°º•…36 (5392.8Hz) |
|
|
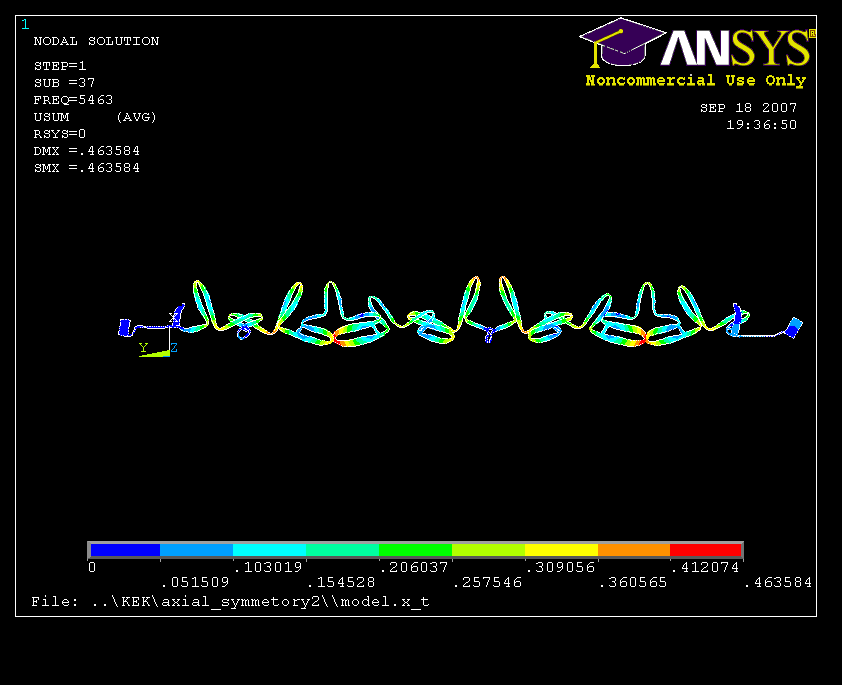
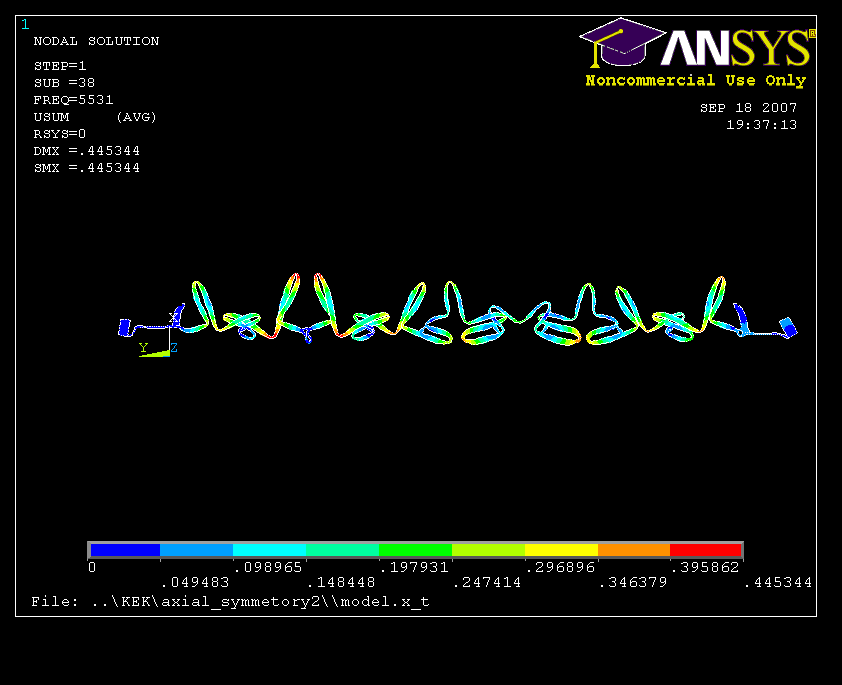
| •‚°º•…37 (5462.8Hz) | •‚°º•…38 (5530.7Hz) |
|
|
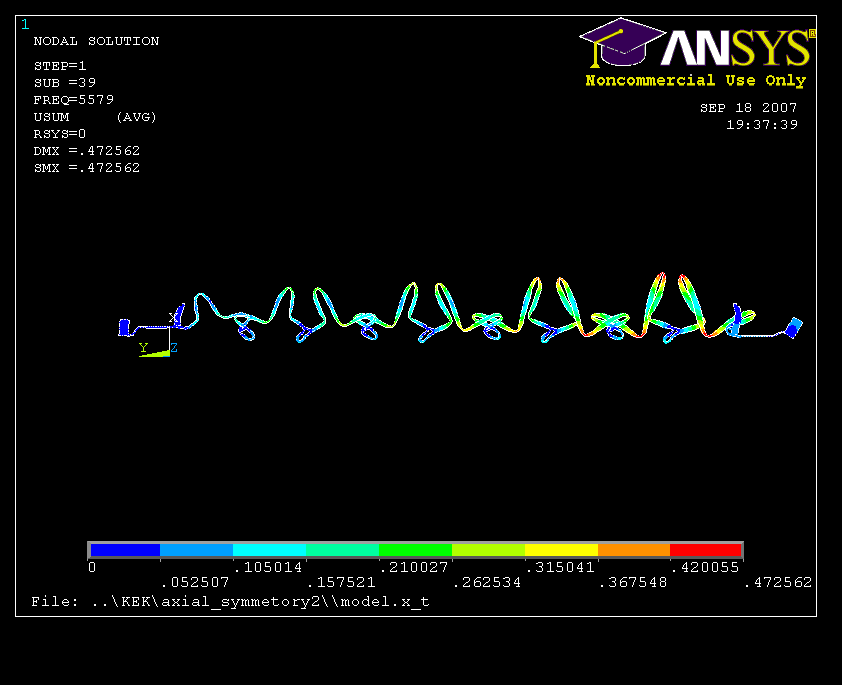
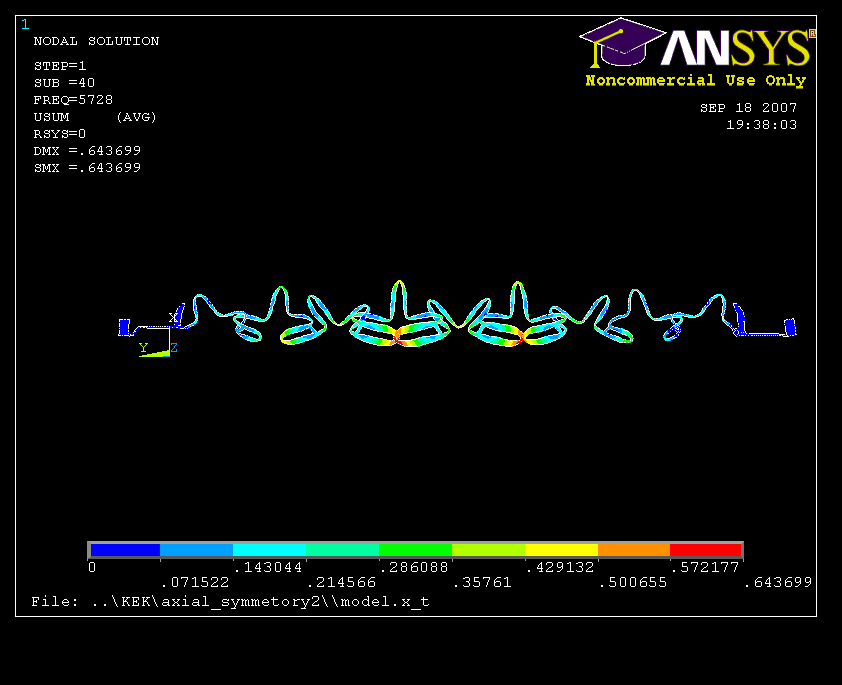
| •‚°º•…39 (5579.2Hz) | •‚°º•…40 (5728.1Hz) |
|
|
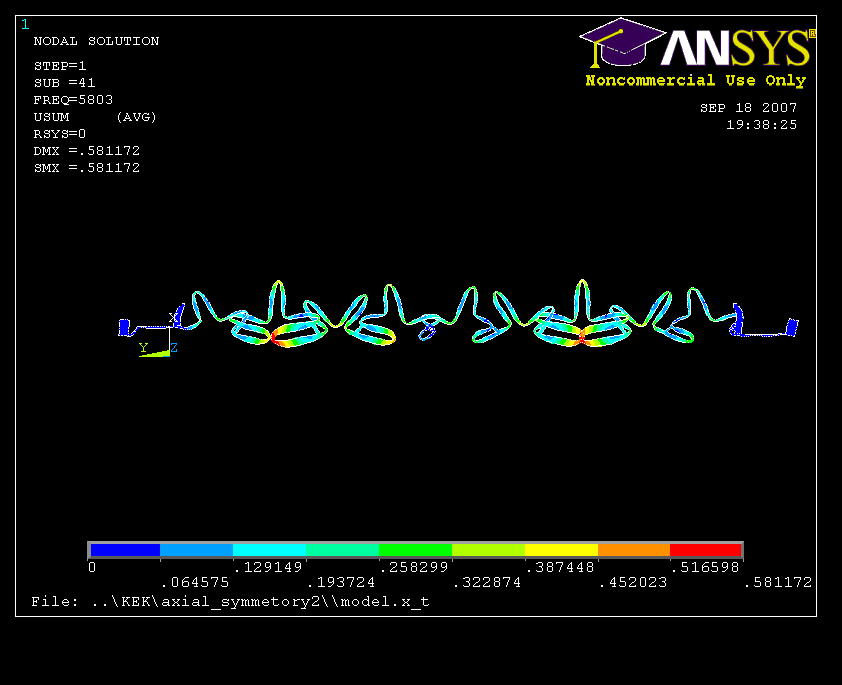
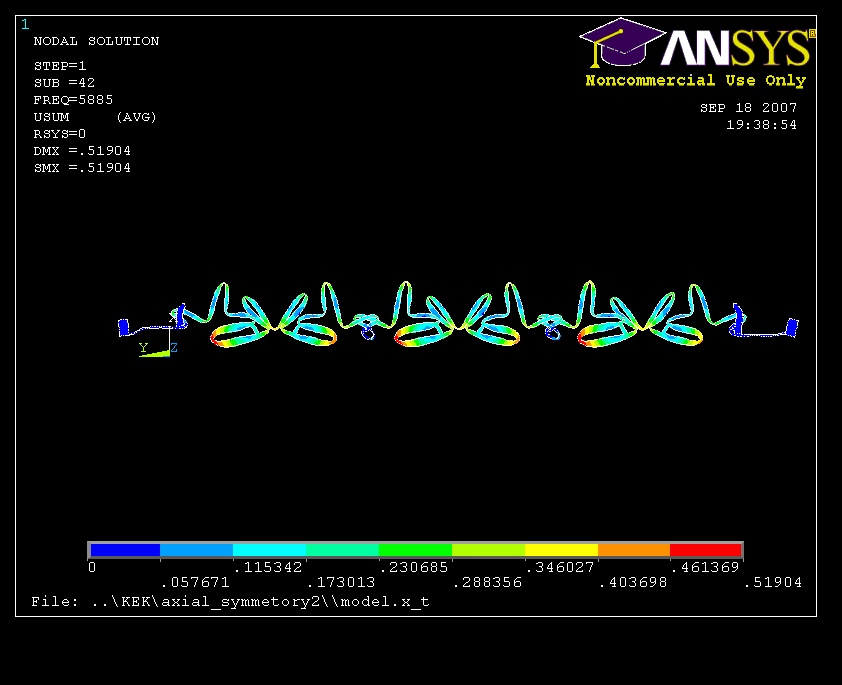
| •‚°º•…41 (5803.5Hz) | •‚°º•…42 (5885.1Hz) |
|
|
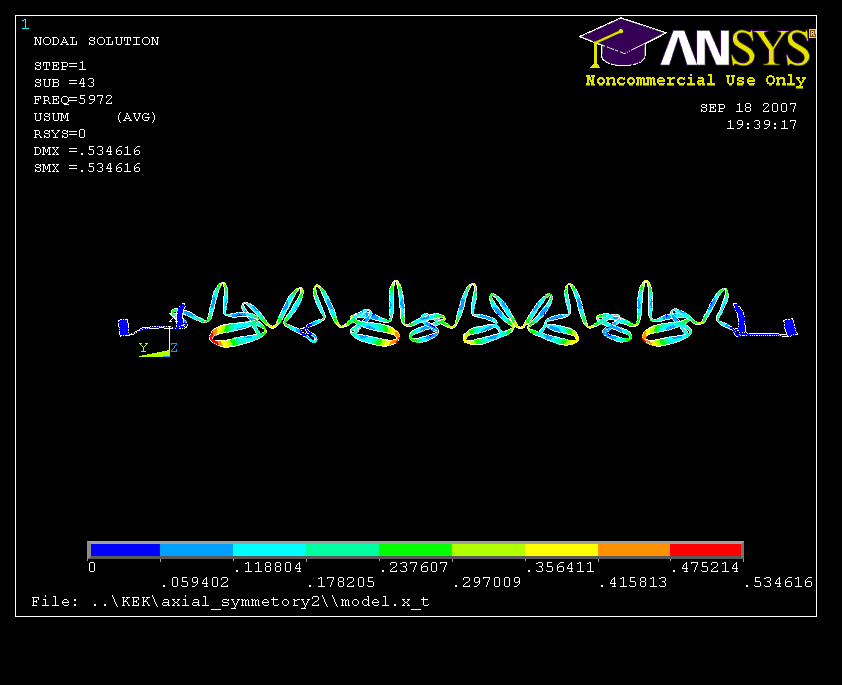
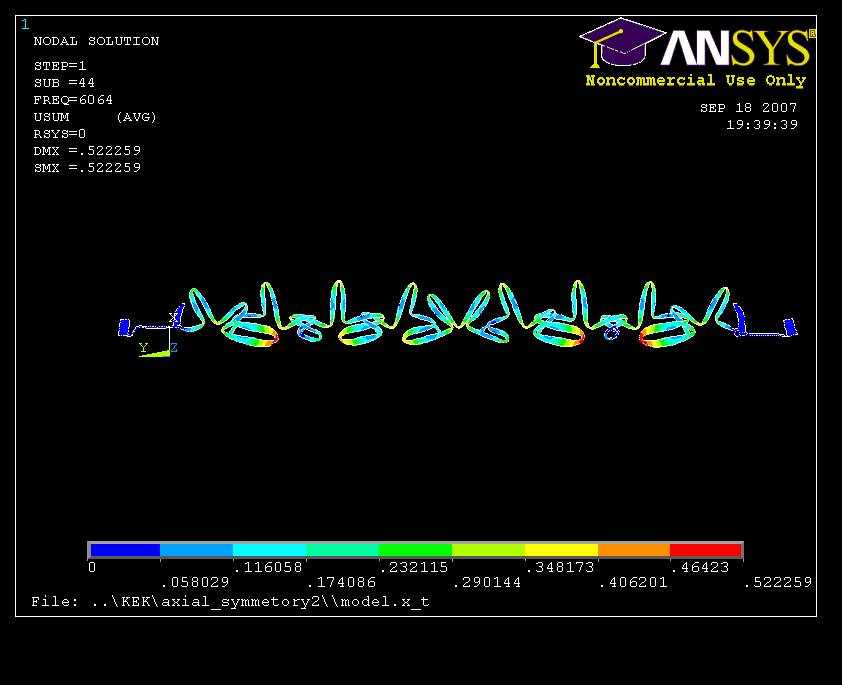
| •‚°º•…43 (5972.5Hz) | •‚°º•…44 (6064Hz) |
|
|
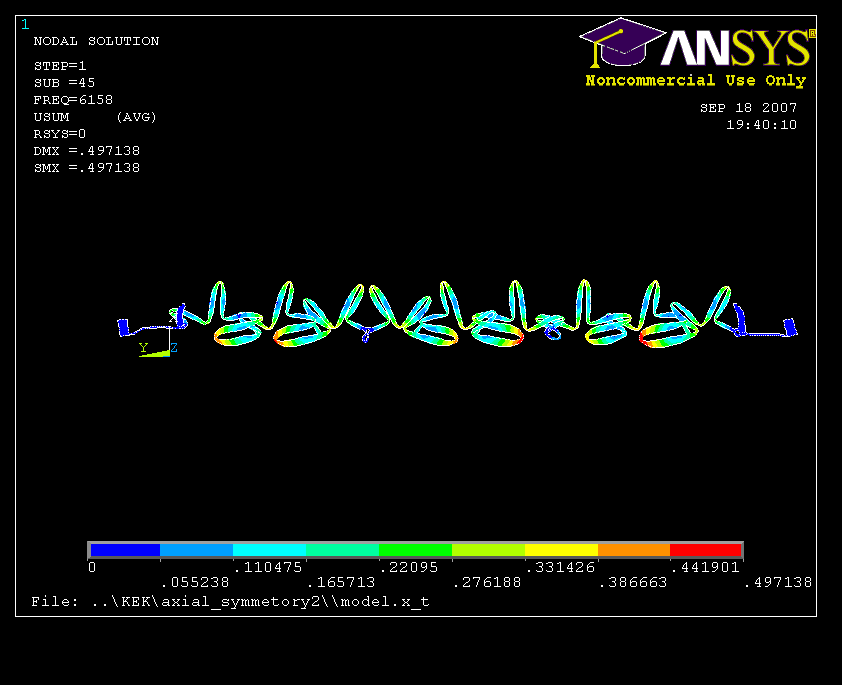
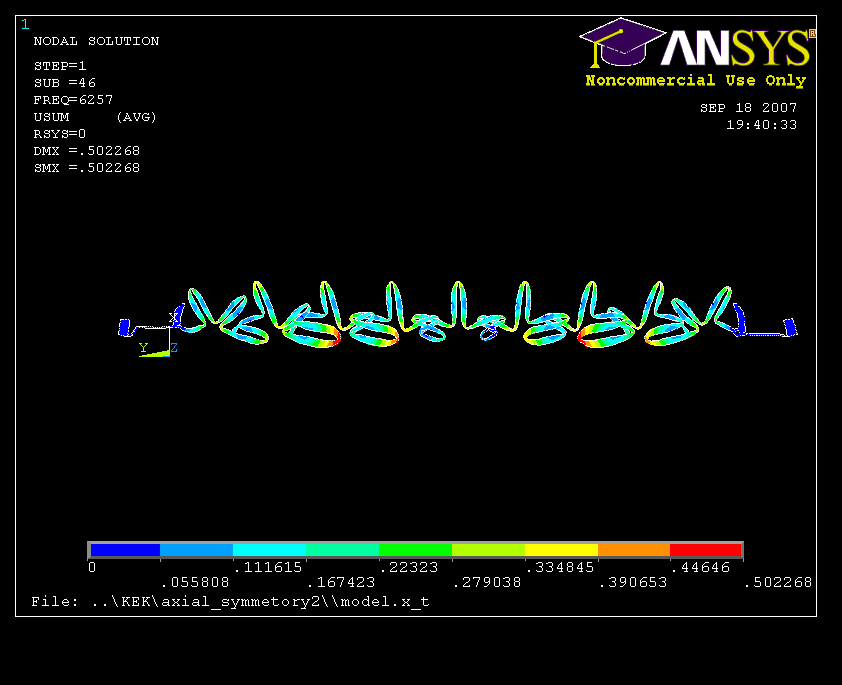
| •‚°º•…45 (6158.5Hz) | •‚°º•…46 (6256.7Hz) |
|
|
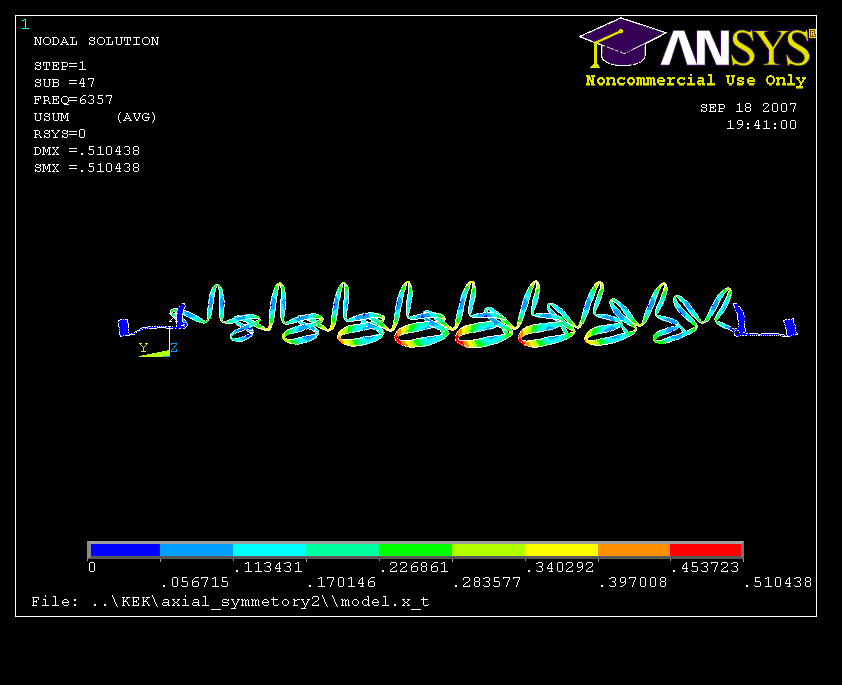
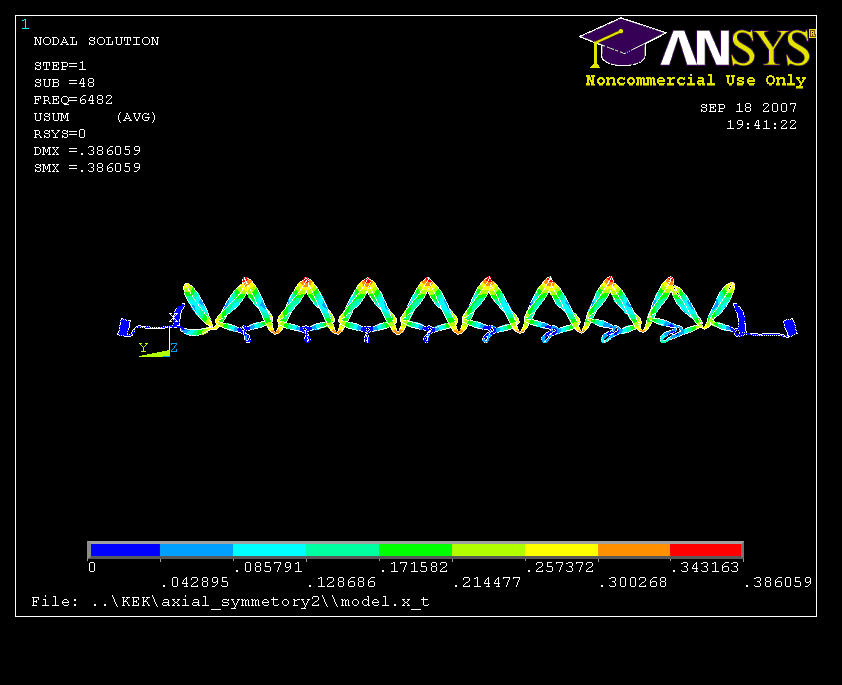
| •‚°º•…47 (6356.6Hz) | •‚°º•…48 (6481.5Hz) |
|
|
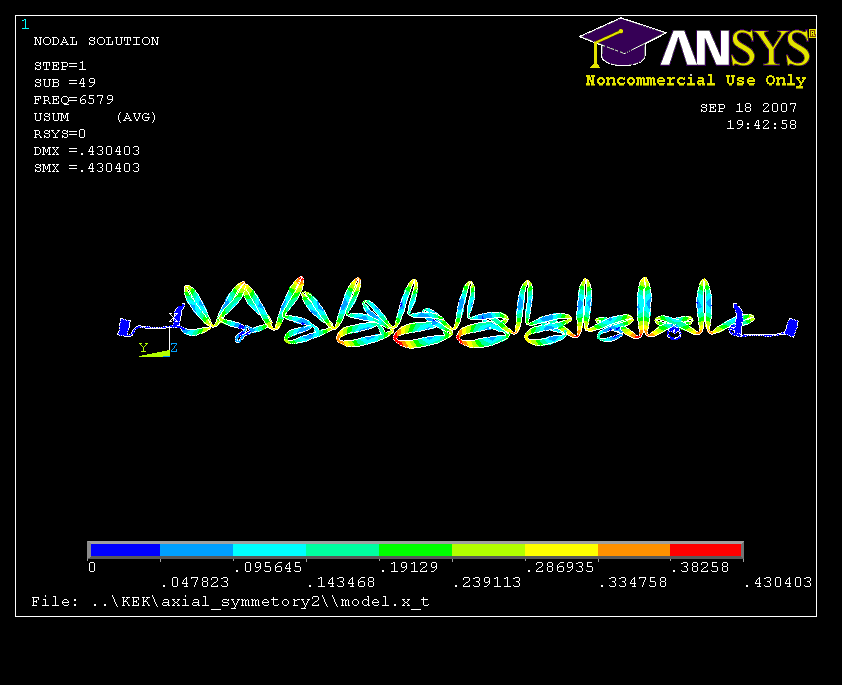
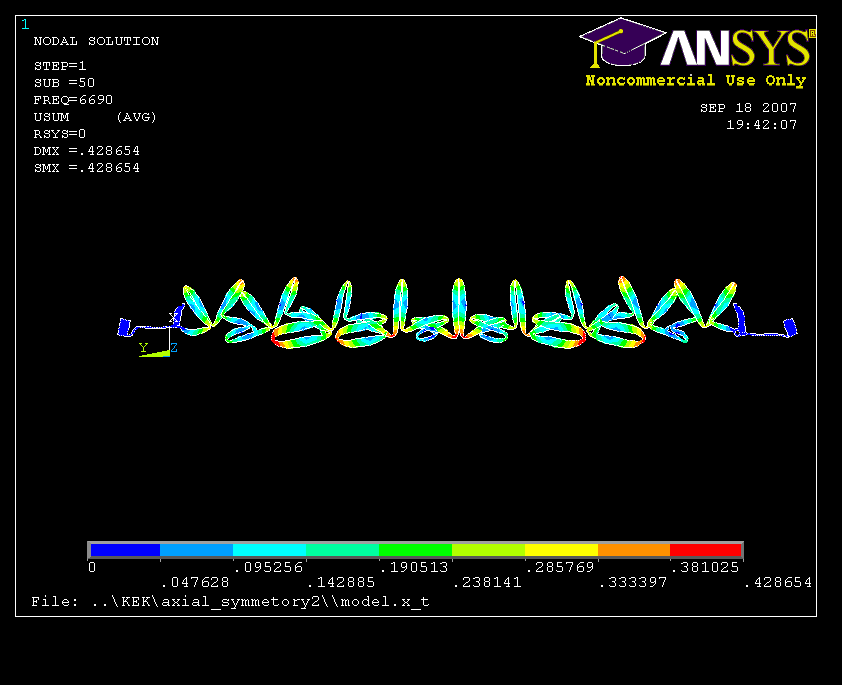
| •‚°º•…49 (6579.1Hz) | •‚°º•…50 (6690.1Hz) |
|
|
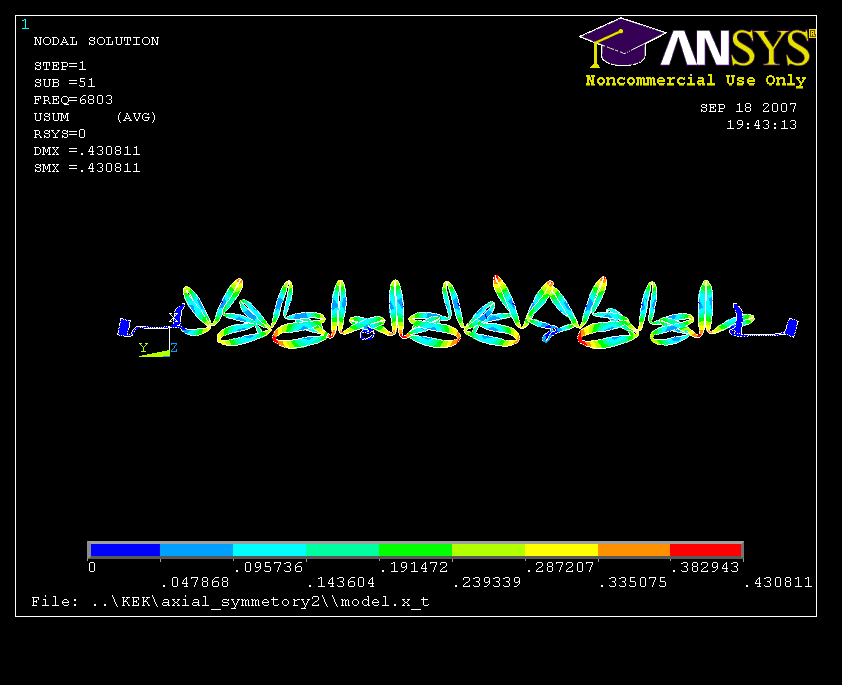
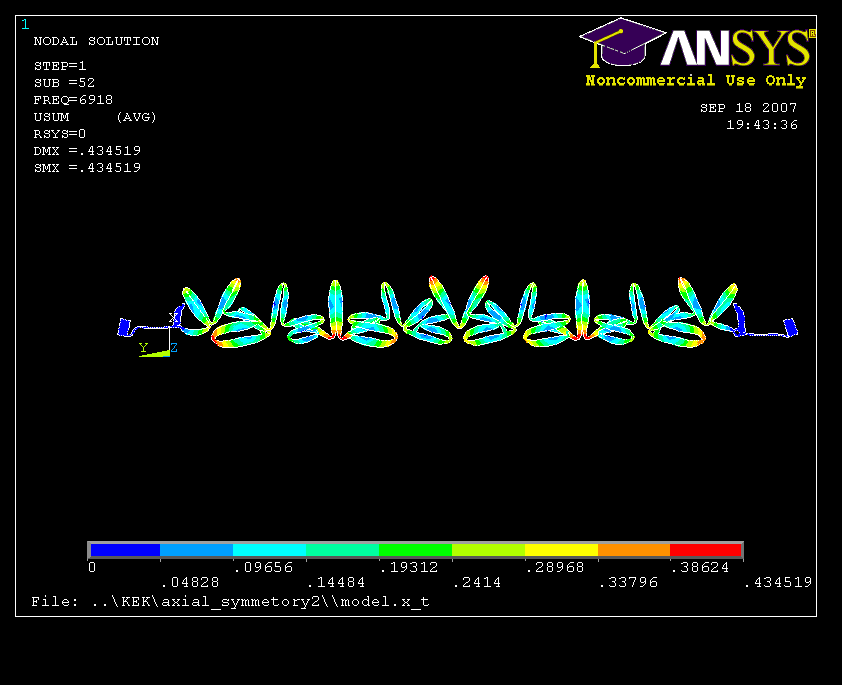
| •‚°º•…51 (6802.9Hz) | •‚°º•…52 (6917.6Hz) |
|
|
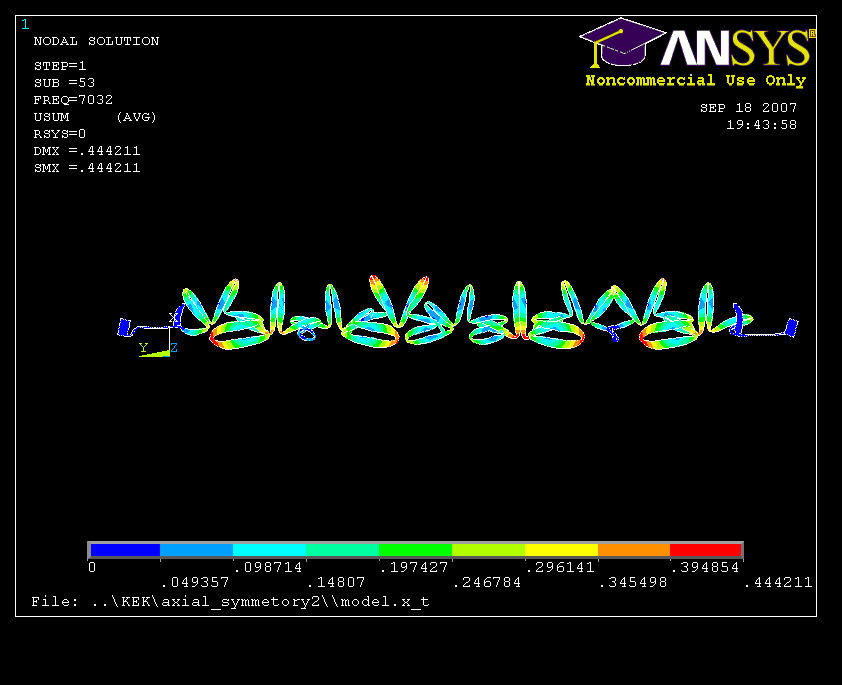
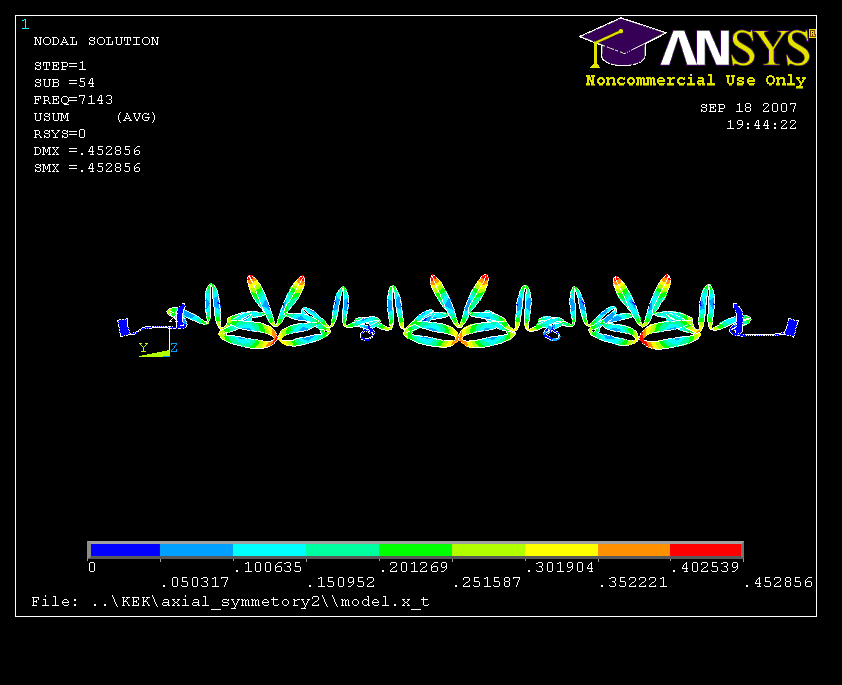
| •‚°º•…53 (7032.4Hz) | •‚°º•…54 (7142.9Hz) |
|
|
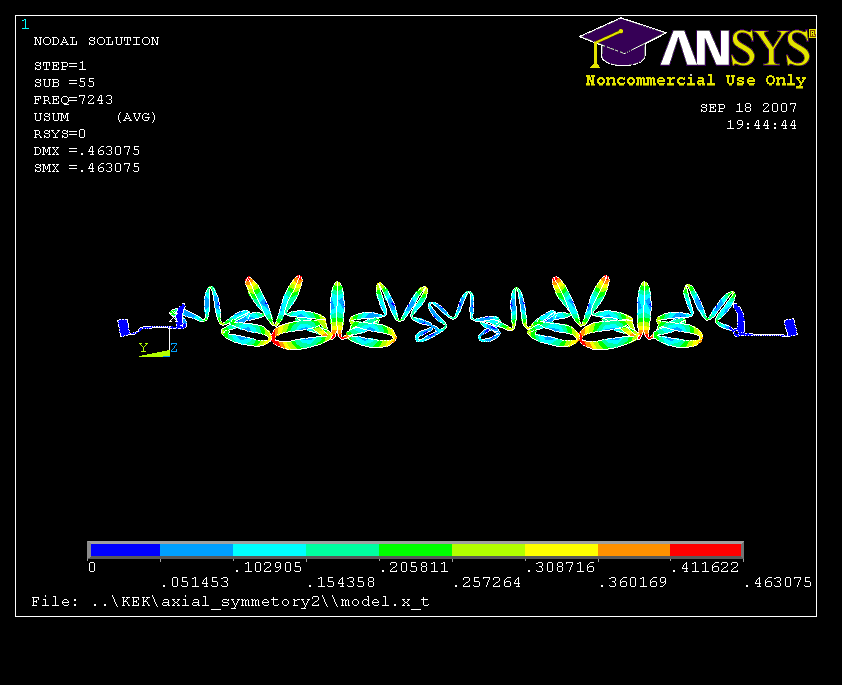
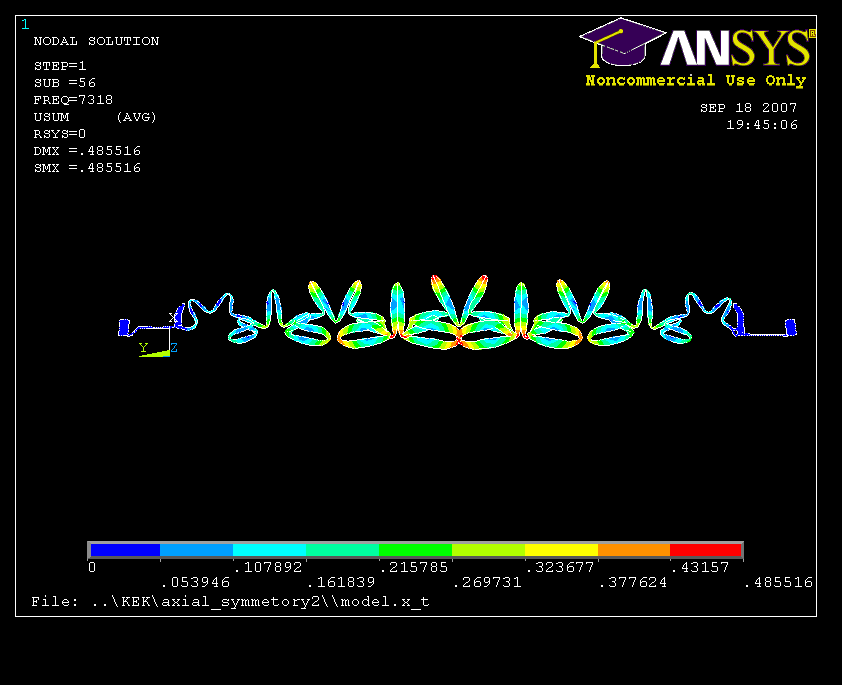
| •‚°º•…55 (7242.7Hz) | •‚°º•…56 (7318.2Hz) |
|
|
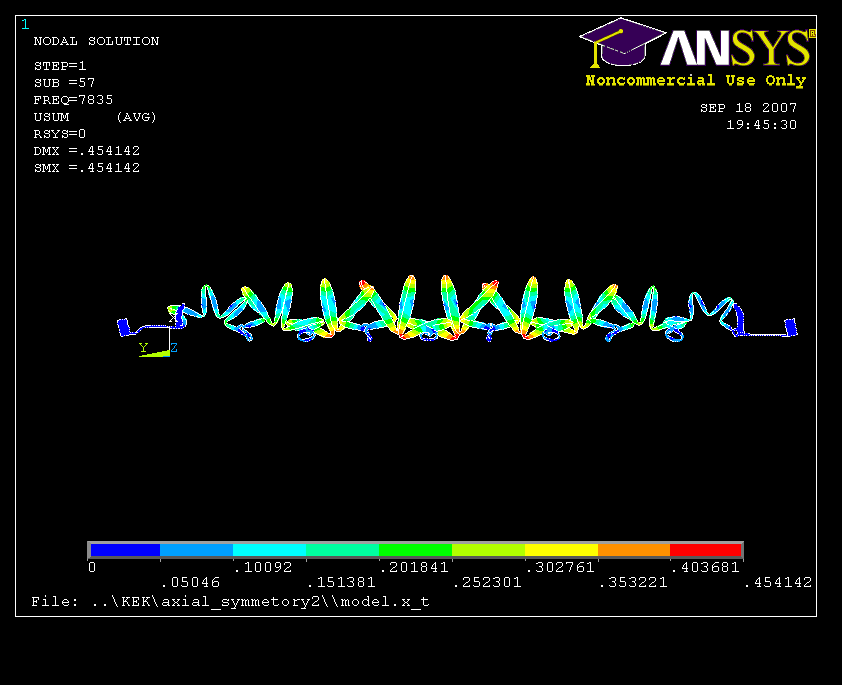
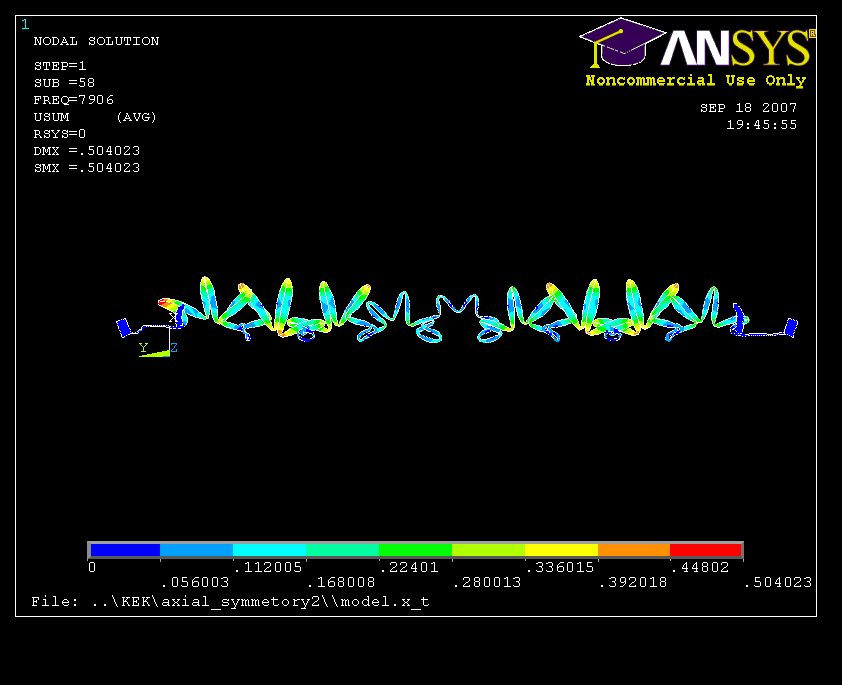
| •‚°º•…57 (7834.7Hz) | •‚°º•…58 (7905.5Hz) |
|
|
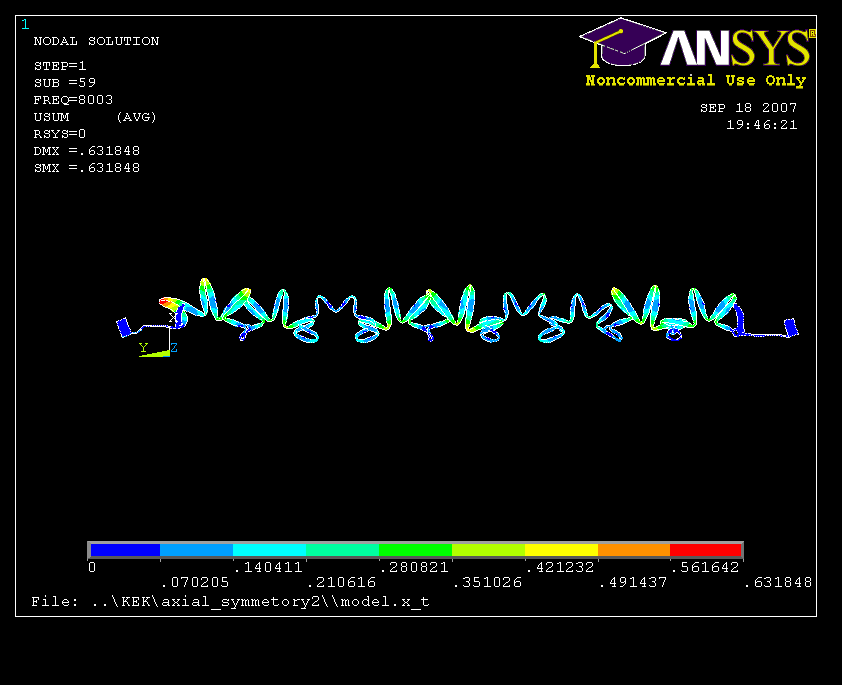
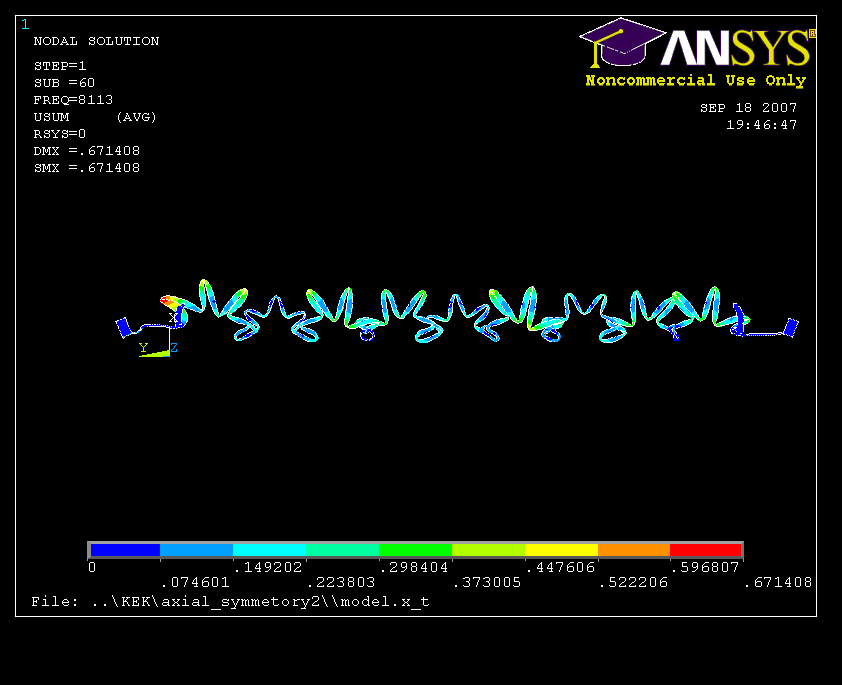
| •‚°º•…59 (8003.3Hz) | •‚°º•…60 (8113.1Hz) |
|
|
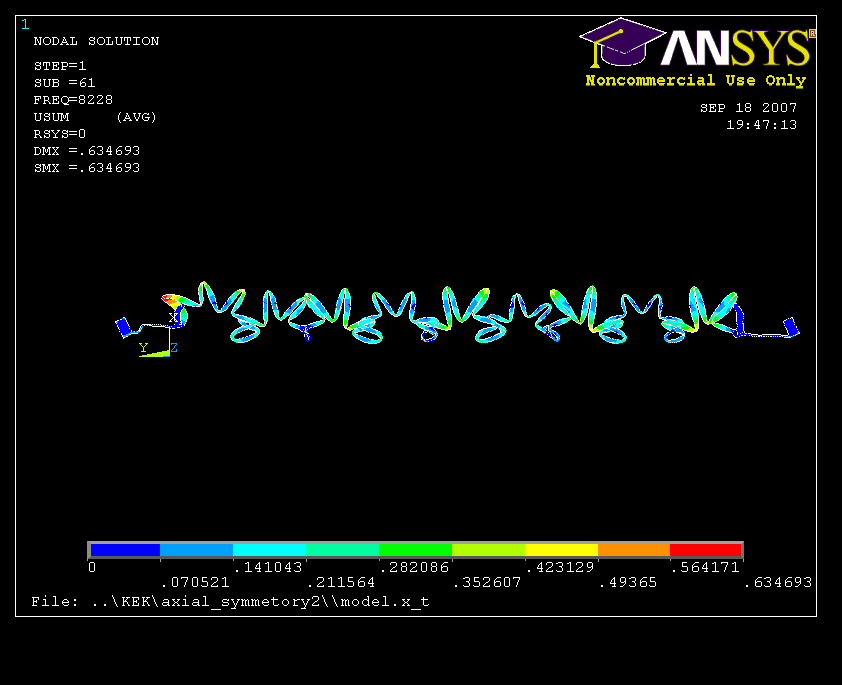
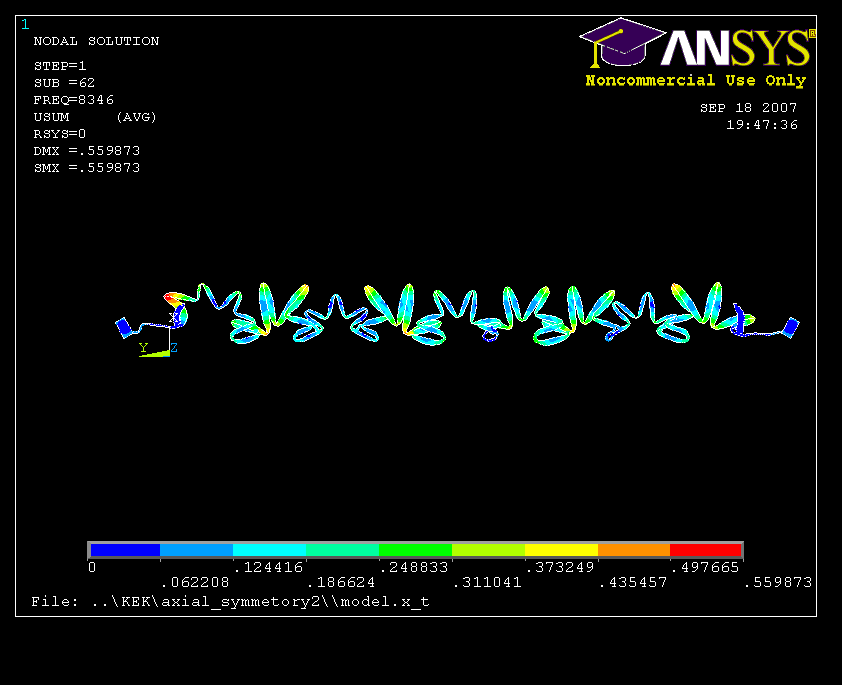
| •‚°º•…61 (8228.4Hz) | •‚°º•…62 (8346.2Hz) |
|
|
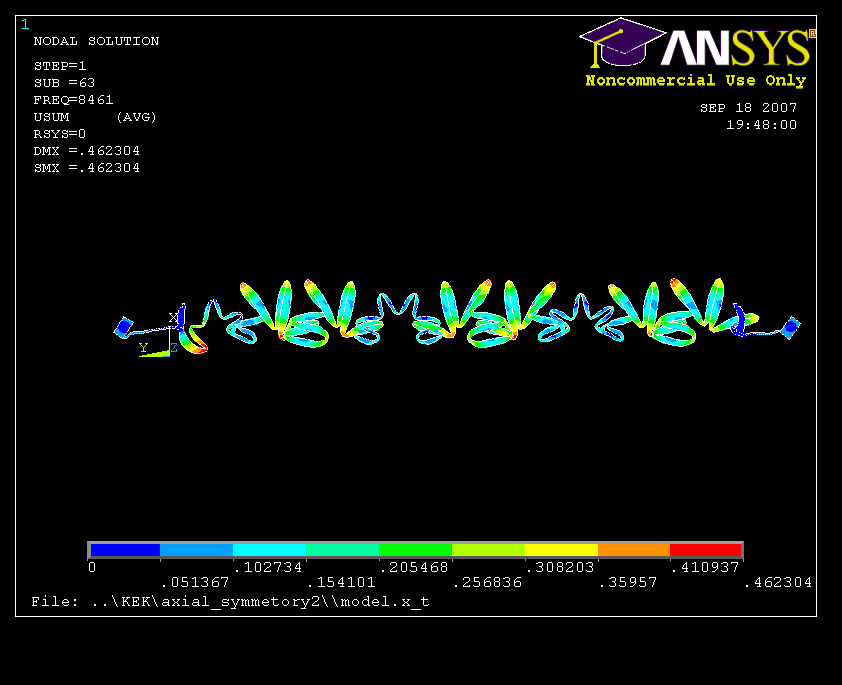
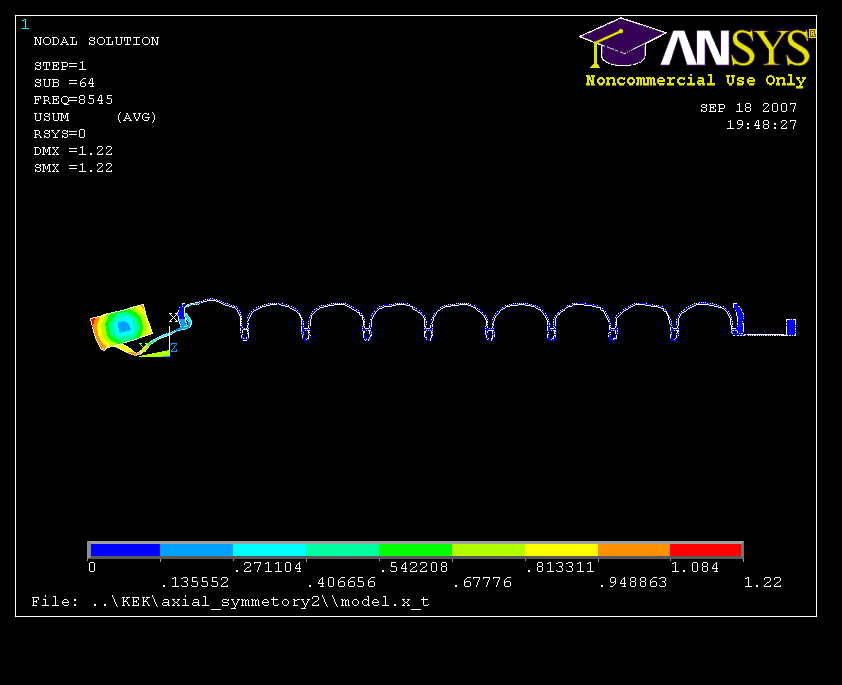
| •‚°º•…63 (8460.8Hz) | •‚°º•…64 (8545.1Hz) |
|
|
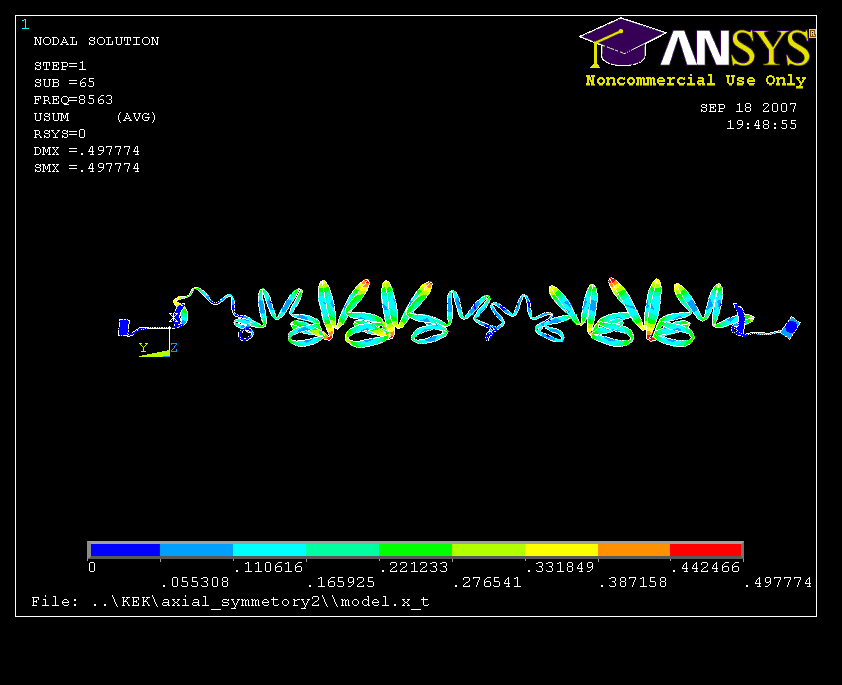
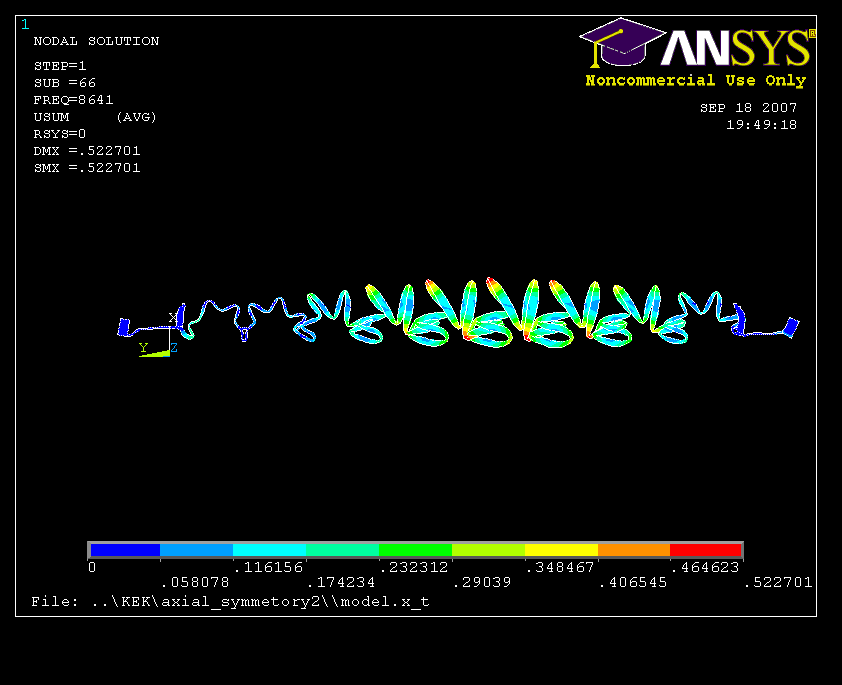
| •‚°º•…65 (8563.3Hz) | •‚°º•…66 (8641.2Hz) |
|
|
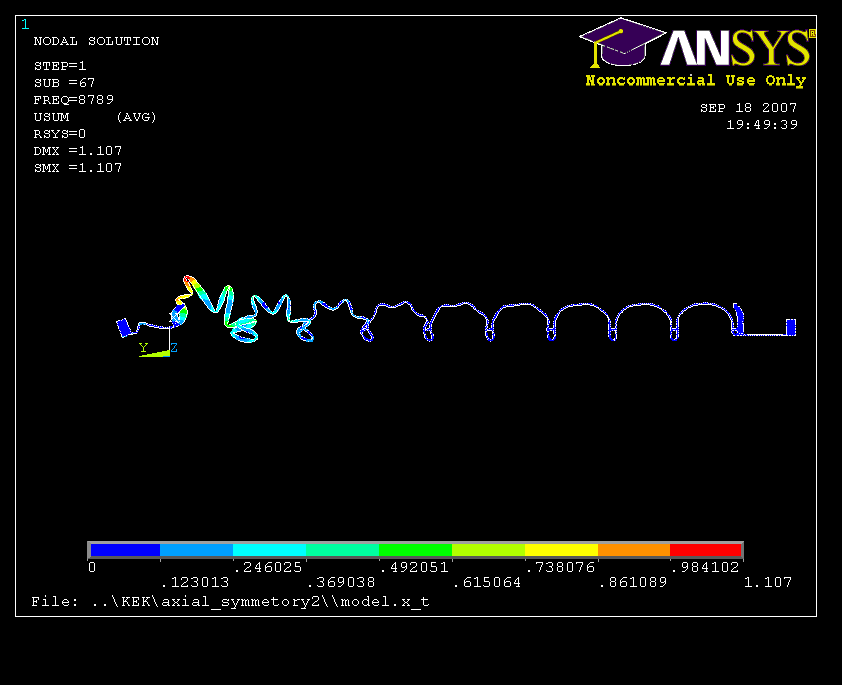
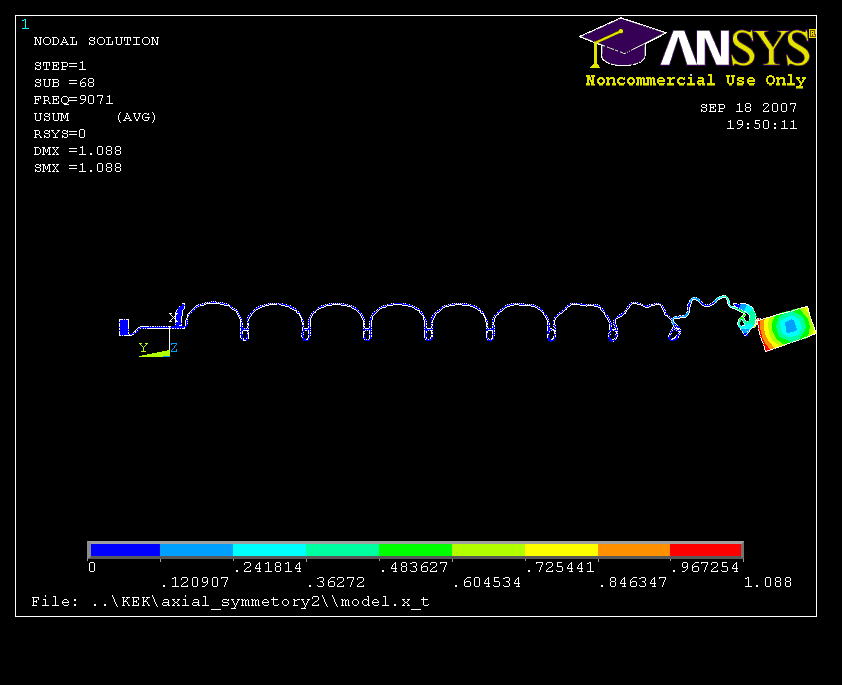
| •‚°º•…67 (8788.8Hz) | •‚°º•…68 (9071.2Hz) |
|
|
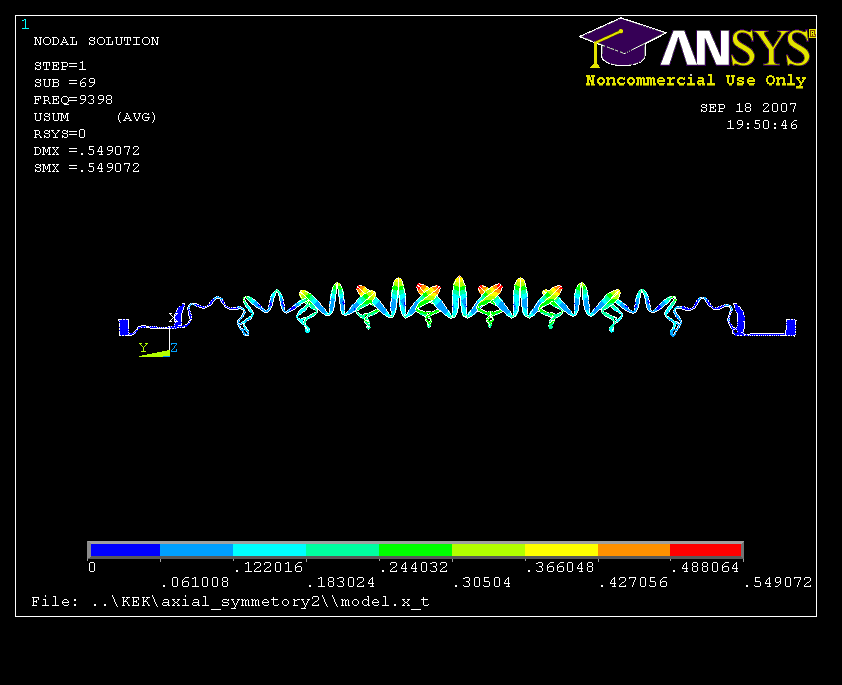
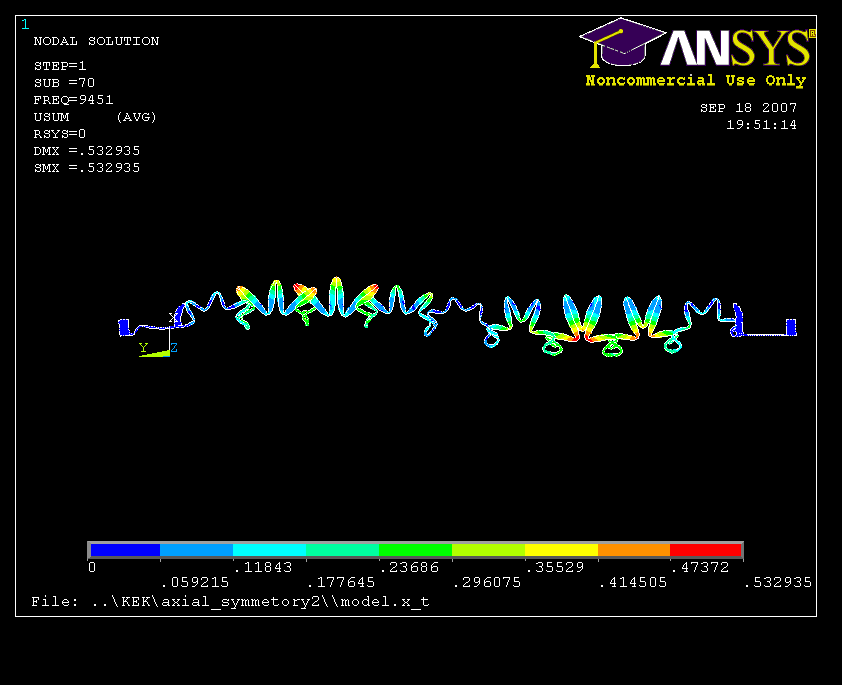
| •‚°º•…69 (9397.9Hz) | •‚°º•…70 (9450.5Hz) |
|
|
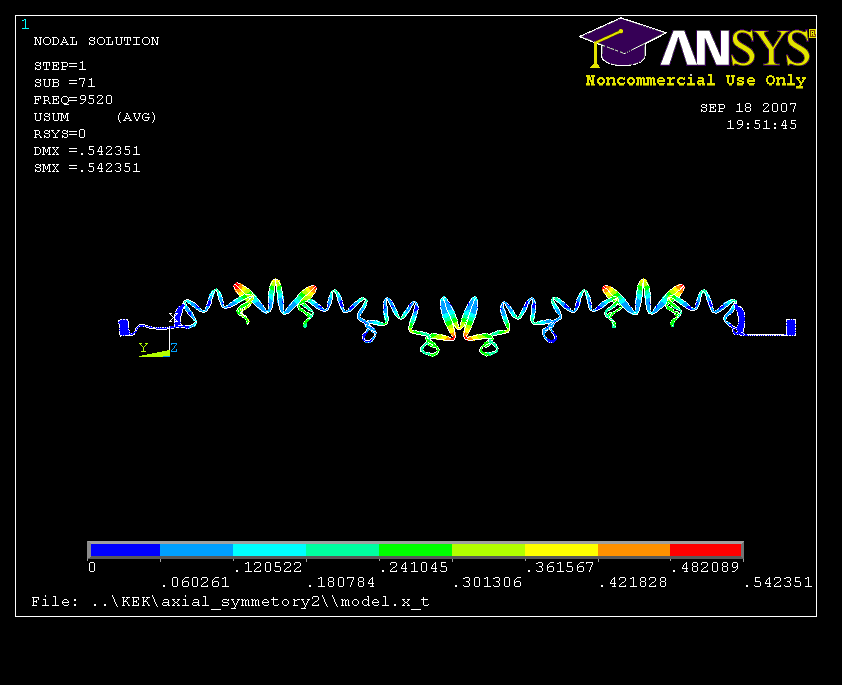
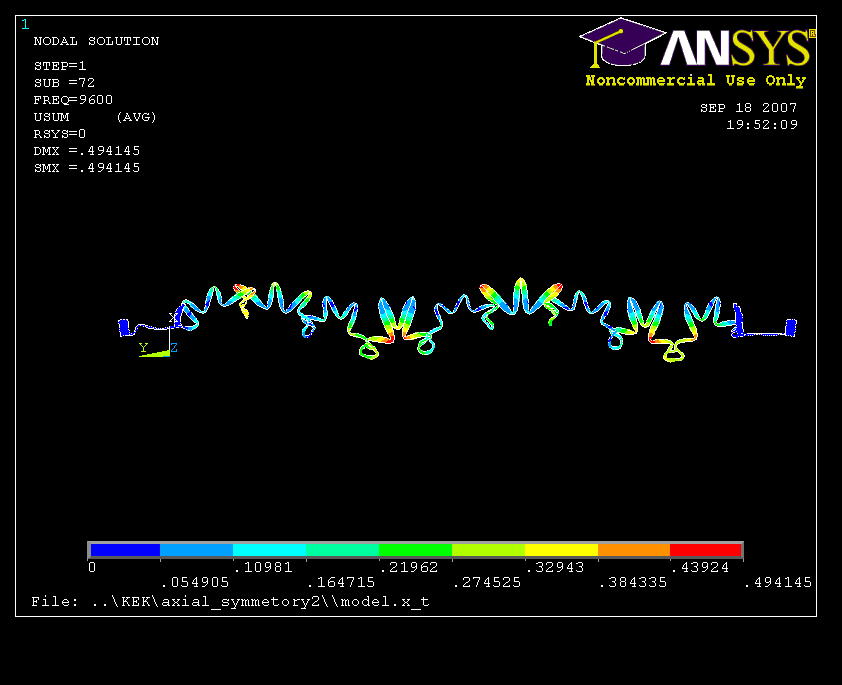
| •‚°º•…71 (9520.2Hz) | •‚°º•…72 (9599.7Hz) |
|
|
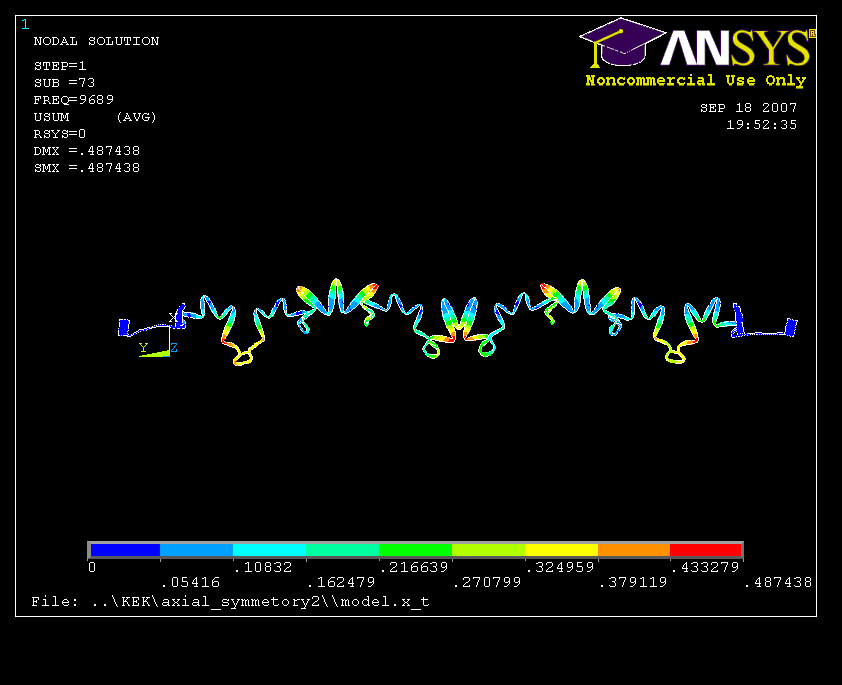
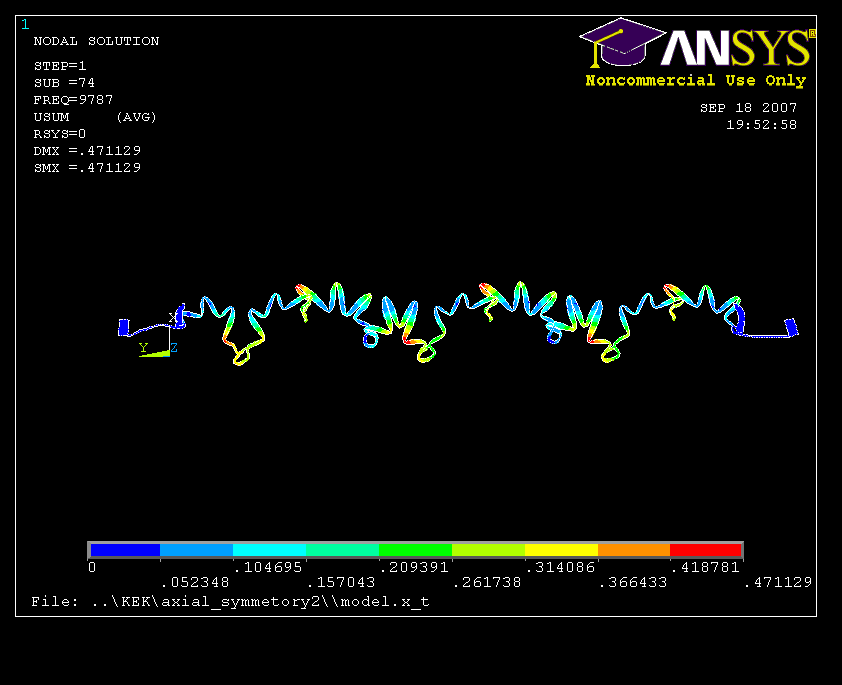
| •‚°º•…73 (9688.6Hz) | •‚°º•…74 (9787.4Hz) |
|
|
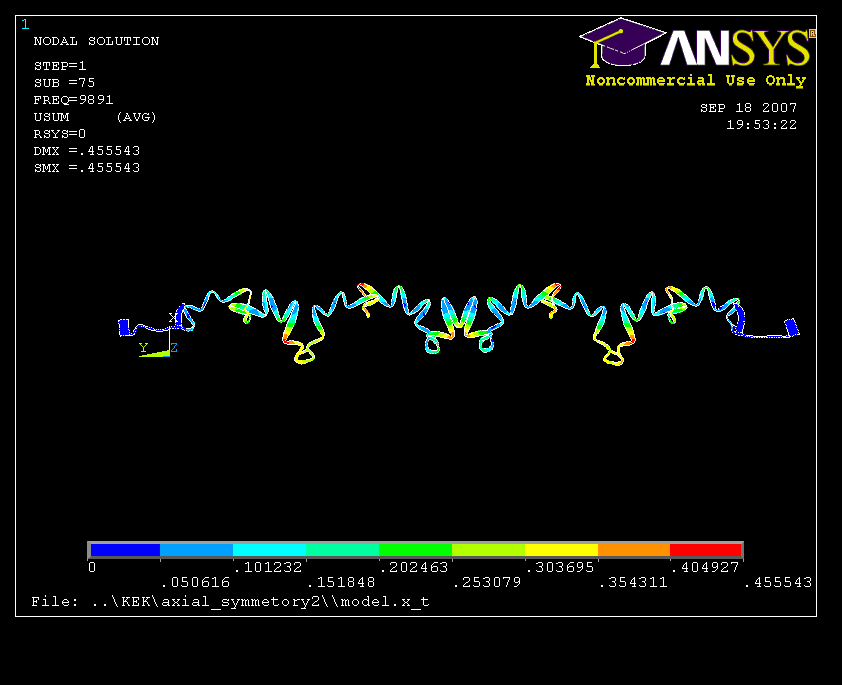
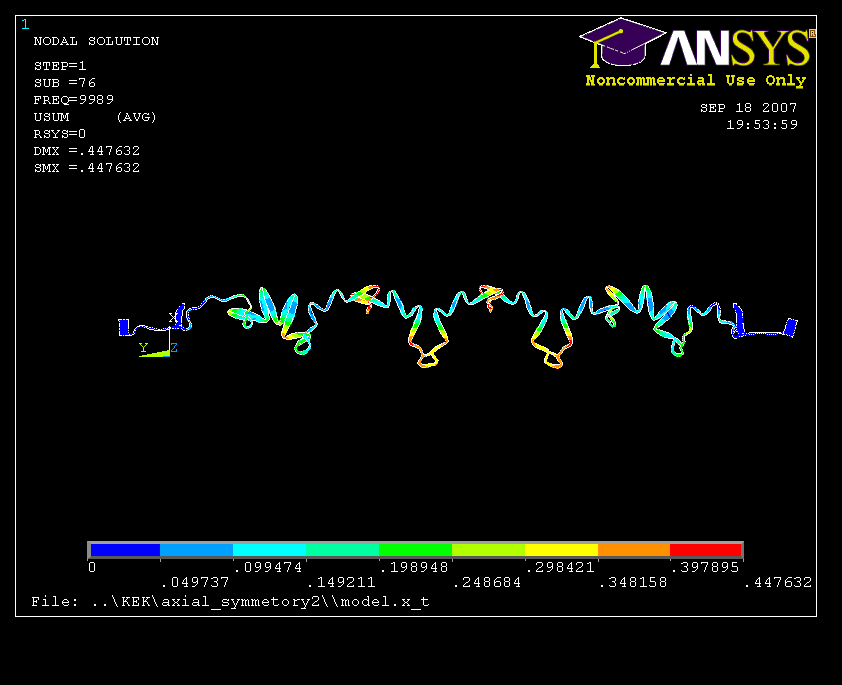
| •‚°º•…75 (9891.4Hz) | •‚°º•…76 (9989.3Hz) |
|
|
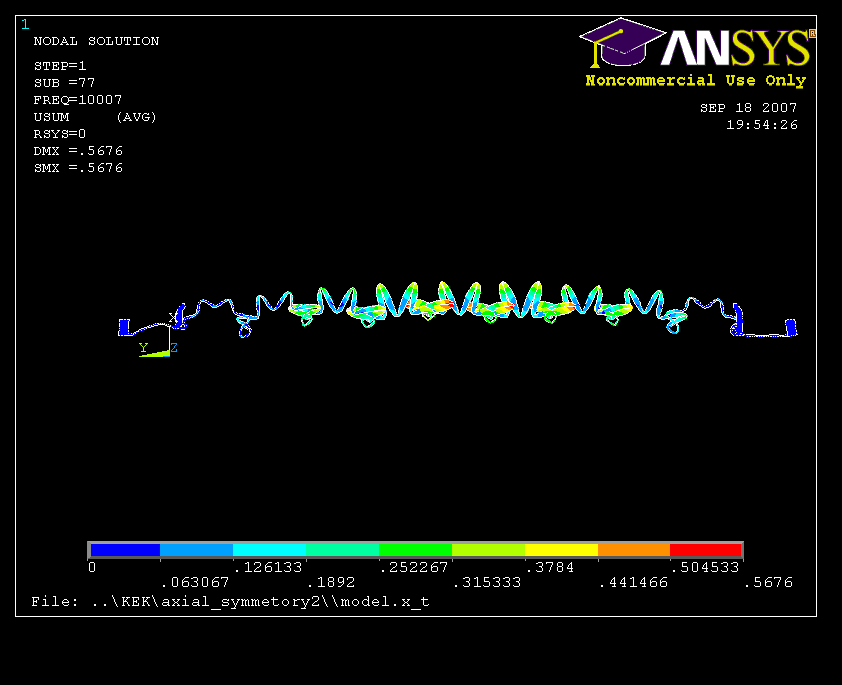
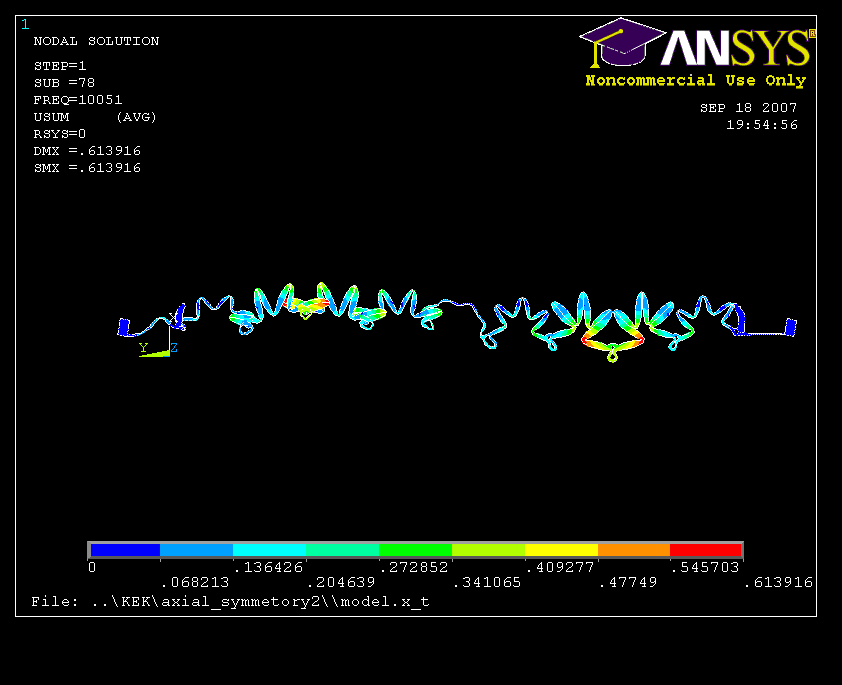
| •‚°º•…77 (10007Hz) | •‚°º•…78 (10051Hz) |
|
|
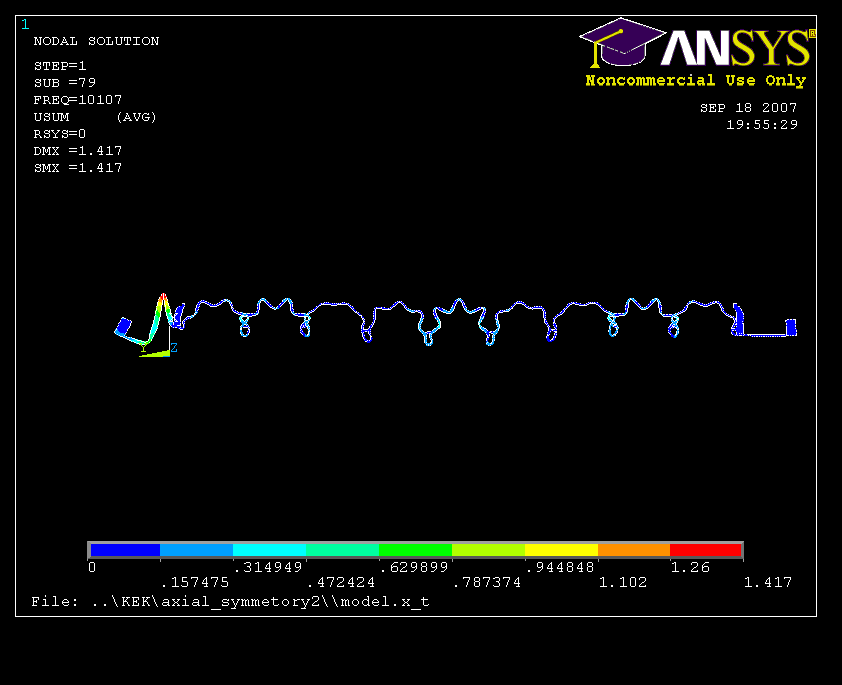
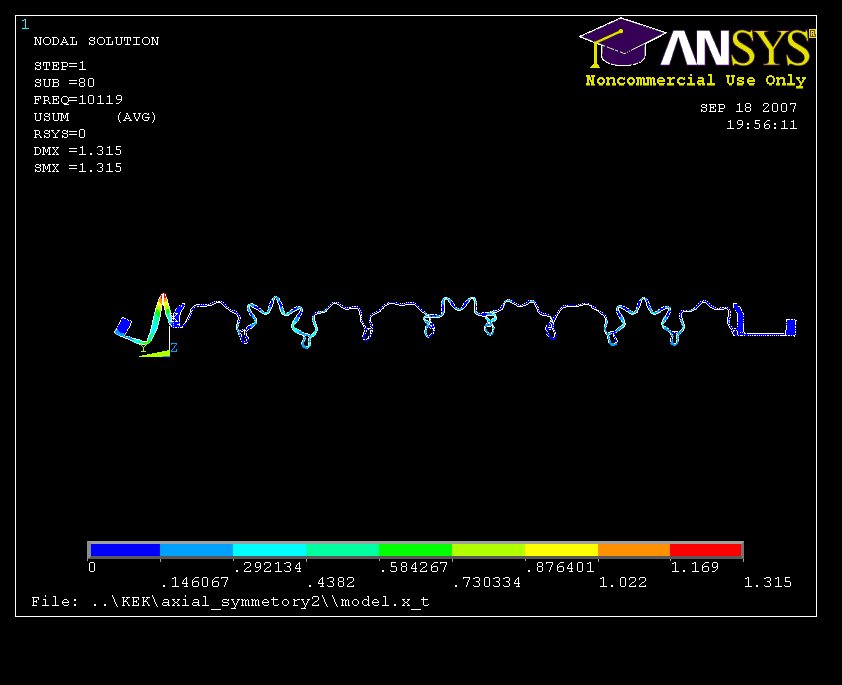
| •‚°º•…79 (10107Hz) | •‚°º•…80 (10119Hz) |
|
|