4 ガウス・ジョルダン法
逆行列が不要であれば,ガウス・ジョルダン法よりも,後で述べるLU分解の法が計算速度 は速い.しかし,教育的効果を考えると,両方の方法を知っておくのは良いことである.4.1 基本的な考え方
ガウス・ジョルダン(Gauss-Jordan)法というのは,連立方程式 (4)を次にように変形させて,解く方法である.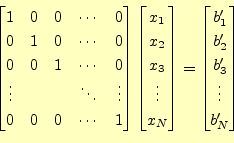 |
この式から明らかに,求める解
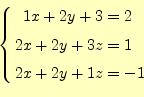
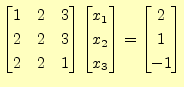
をガウス・ジョルダン法で解を求める.
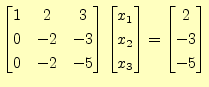
解くべき,方程式
 |
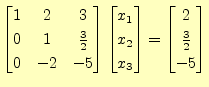
2行
 |
3行
 |
 |
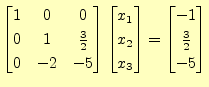
1行
 |
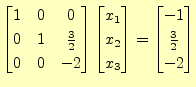
3行
 |
 |
 |
これで,ガウス・ジョルダン法による対角化の作業は完了である.これか ら,
これで,ガウス・ジョルダン法が理解できたと思う.もう少し数学的にその内容を説明す
る2.そのために,次の線形行列方程式を考える.
ここでは,紙面の関係で係数行列が
![]() について述べるが,一般的に
について述べるが,一般的に![]() への拡
張は容易である.
への拡
張は容易である.

ここで,
| (12) | ||
| (13) |
が分かる.もちろん,
式(11)について,以下のことが容易に分かる.
-
 の任意の2行を入れ替えて,それに対応する
の任意の2行を入れ替えて,それに対応する
 と
と
 を入れ替えた場合,
を入れ替えた場合,
 や
や
 の値と順序は変わらない.た
だし,
はもはや単位行列ではない.これは連立方程式の順序を入れ替
えて書いていることに相当している.
の値と順序は変わらない.た
だし,
はもはや単位行列ではない.これは連立方程式の順序を入れ替
えて書いていることに相当している.
-
の任意の行を,その行と別の行との線形結合に置き換え,同
時に対応する
と
も同様に置き換える.この場合,
と
の値と順序は変わらない.当然,この場合も
はもはや単
位行列ではない.
-
の任意の2列を入れ替えて,それに対応する
と
の行を入れ替えれば,
と
の順序は入れ替える必要
は無い.この場合,解の行の順序が変わるので,最後に元に戻す操作が必要
になる.
この3つの操作を組み合わせて,係数行列
![]() を単位行列に変換するのがガウス・ジョ
ルダン法である.
を単位行列に変換するのがガウス・ジョ
ルダン法である.
![]() が単位行列に変換されれば,右辺に
が単位行列に変換されれば,右辺に
![]() と
と
![]() が表れ
る.したがって,解と逆行列が求められたことになる.もし,逆行列が不要であれば
が表れ
る.したがって,解と逆行列が求められたことになる.もし,逆行列が不要であれば
![]() だけ計算し,逆行列のみ必要であれば
だけ計算し,逆行列のみ必要であれば
![]() のみ計算する.
のみ計算する.
4.2 ピボット選択
先に示した,ガウス・ジョルダン法の3つの基本操作のうち,2番目しか使わない方法を 「ピボット選択なしのガウス・ジョルダン法」と言う.最初,人力で連立方程式を解いた 方法である.この方法の明らかにまずい点は,もし1にしたい対角要素がゼロの場合,計 算ができなくなってしまうところにある.この割る要素をピボット(pivot)と言う.ゼロ でないにしても,そのピボットが非常に小さい値の場合,丸め誤差が大きくなり問題であ る3.このようなことから,普通は ピボット選択なしのガウス・ジョルダン法というものは考えられない.この問題を避けるためにどうするかというと,ピボット選択という方法を使う.方法は簡 単で,先に示した3つの基本操作のうち,1番目と3番目を使って,対角に素性の良い要素 をもってくる.1番目の操作のみを用いて行を入れ替える方法を,部分ピボット選択 (partial pivoting)と言う.1番目の操作と3番目の操作を使って,行と列を入れ替え るのを完全ピボット選択(full pivoting)と言う.すでにある程度出来上がっている 単位行列を壊したくないので,ピボットの選択は操作している行の下の行から選ばなく てはならない.
部分ピボット選択の方が明らかに簡単である.解の行列を入れ替える必要が無い からである.その場合,行の入れ替えしかしないので,ピボットはその列から選 ばなくてはならない.完全ピボット選択の方が選べる要素が多いが, 最終的な解の精度はあまり変わらないようである.したがって,ここではプログ ラムの簡単な部分ピボット選択で計算する事にする.
次に考えなくてはならないのは,ピボットを選択する基準である.簡単に言えば, 大きな要素選択すれば大体よい.しかし,ある行を100万倍して,それに 対応する右辺の行も100万倍することもできるので,ただ大きいというだけ では問題がありそうである.どうするかと言うと,各方程式の最大係数を1に規 格化して,最大のものをピボットに選ぶことが行われている.この方法を陰 的ピボット選択(implicit pivoting)と呼ぶ.
これで,ピボットの問題も片付いたので,フローチャートを書いてみる.
4.3 フローチャート
ガウス・ジョルダン法のフローチャートを図1に示す.ホームページ: Yamamoto's laboratory
著者: 山本昌志 Yamamoto Masashi
平成18年10月16日